
Jianfei Jiang, Qizhong Li, Miaohua Huang, Jie Gong. Real-Time Detection of Obstacles and Passable Areas Based on Three-Dimensional Lidar[J]. Laser & Optoelectronics Progress, 2019, 56(24): 242801
- Laser & Optoelectronics Progress
- Vol. 56, Issue 24, 242801 (2019)
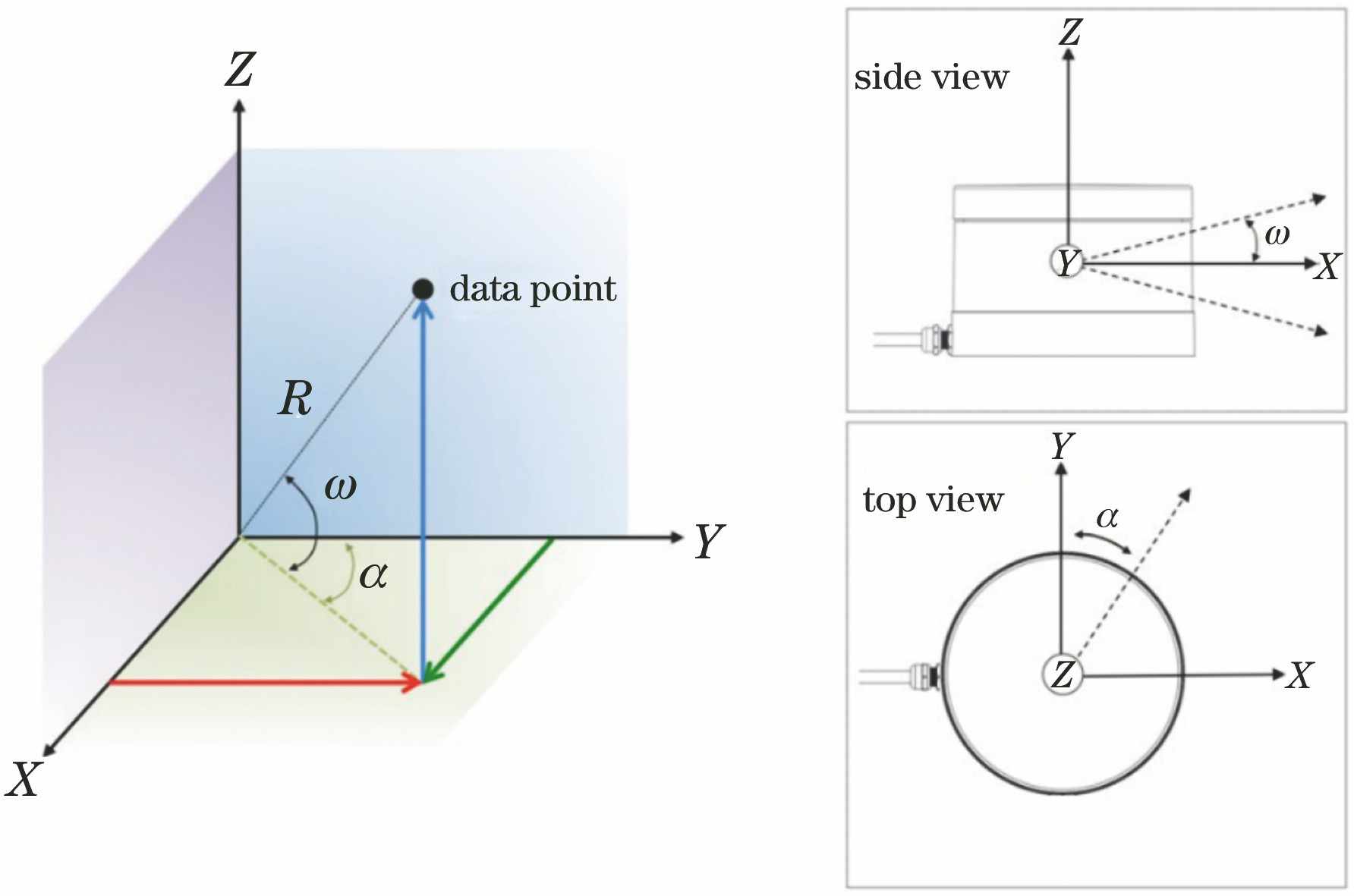
Fig. 1. Three-dimensional coordinate system of lidar

Fig. 2. Through-pass filter results for point clouds. (a) Original point cloud; (b) through-pass filtered point cloud
Fig. 3. Statistical filtering result of point clouds
Fig. 4. Comparison of segmentation effects of ground and non-ground point clouds. (a) Ground separation algorithm based on morphological filter; (b) ground slope separation algorithm
Fig. 5. Obstacle detection comparison chart. (a) Euclidean clustering algorithm for obstacle detection; (b) improved Euclidean clustering algorithm for obstacle detection
Fig. 6. Diagram of laser beam distance. (a) Side view of laser beam distance; (b) top view of laser beam distance
Fig. 7. Detection results of passable areas. (a) Ground point cloud in Fig. 3 ; (b) detection of ground point passable area
Fig. 8. Combined detection results
Fig. 9. Experimental platform. (a) Front view; (b) side view
Fig. 10. Detection results of uphill road condition. (a) Uphill scene; (b) lidar original point cloud; (c) detection result of non-ground obstacle; (d) detection result of ground passable area; (e) combined detection results (1: car, 2: person, cuboid frame: single obstacle)
Fig. 11. Detection results of downhill road condition. (a) Downhill scene; (b) lidar original point cloud; (c) detection result of non-ground obstacle; (d) detection result of ground passable area; (e) combined detection result (1: car, 2,3: person, cuboid frame: single obstacle)
Fig. 12. Detection time-consuming of the proposed algorithm
|
Table 1. Basic parameters of Velodyne VLP-16 lidar
|
Table 2. Distance corresponding to each laser beam
| ||||||||||||||
Table 3. Average accuracy of algorithm for different road conditions%

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20