
Wensong Song, Zonghua Zhang, Nan Gao, Zhaozong Meng. Spatial Pose Calibration Method for Lidar and Camera Based on Intensity Information[J]. Laser & Optoelectronics Progress, 2022, 59(2): 0215003
- Laser & Optoelectronics Progress
- Vol. 59, Issue 2, 0215003 (2022)
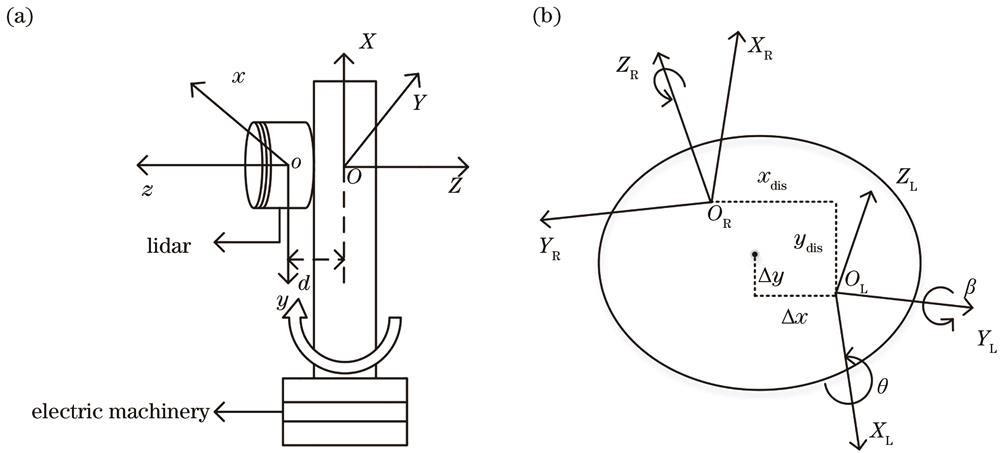
Fig. 1. Three-dimensional scanning system of the lidar. (a) Coordinate system of the lidar; (b) on-axis coordinate system
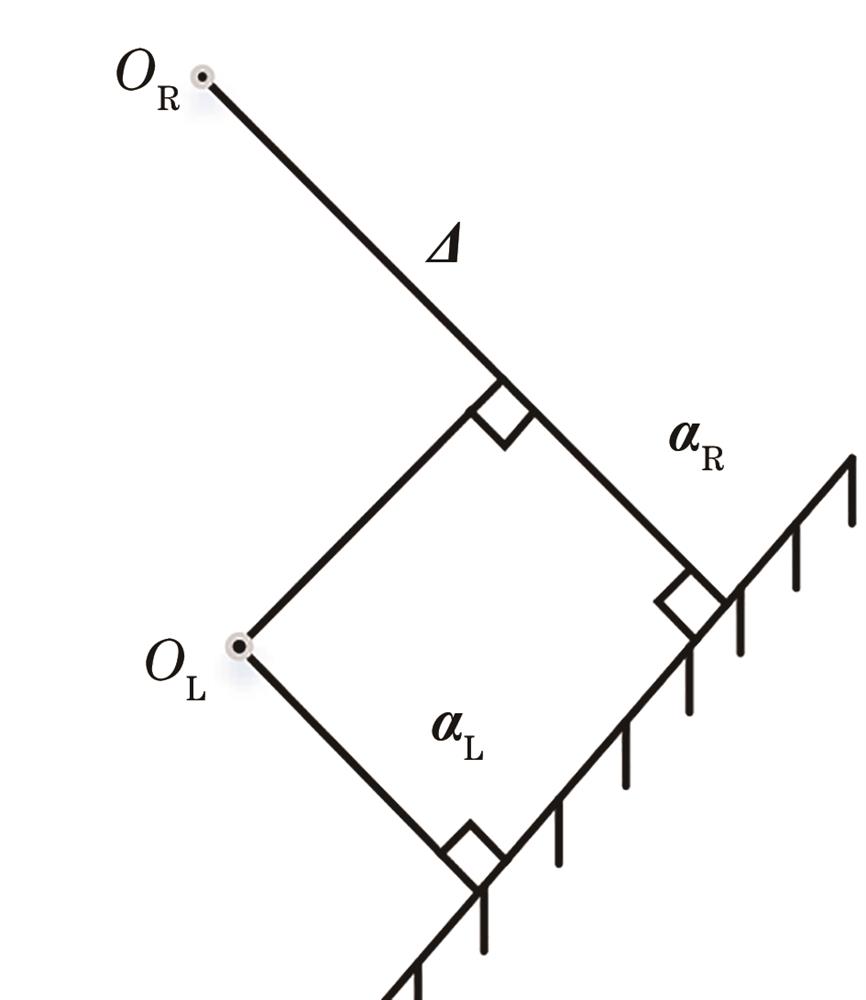
Fig. 2. Distance from the origin of the left and right coordinate systems to the plane
Fig. 3. Principle of the camera-lidar system
Fig. 4. Filtering result of the point cloud. (a) Cross-sectional view of the point cloud; (b) processing result of the radius filtering algorithm
Fig. 5. Coordinate system of the virtual camera
Fig. 6. Physical image of the camera-lidar system. (a) Front view; (b) back view
Fig. 7. Effect of parameter verification. (a) Before calibration; (b) after calibration; (c) room model
Fig. 8. Environment of the joint calibration experiment
Fig. 9. Grayscale images of different pixel sizes (a) Pixel size is too large; (b) pixel size is too small; (c) pixel size is moderate
Fig. 10. SIFT feature point matching graph
Fig. 11. Variation curve of the reprodjection error
Fig. 12. Result of data fusion. (a) Fusion environment; (b) fusion effect
|
Table 1. Camera parameters after calibration
|
Table 2. Self-calibration results of lidar
| ||||||||||||||||||||||||
Table 3. Comparison of room size
|
Table 4. Calibration result
|
Table 5. Reprojection errors of different methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20