
Zihao Yu, Jin Liu, Haima Yang, Pengcheng Zhang, Yi Chen. Three-Dimensional Surface Reconstruction Based on Edge Detection and Reliability Sorting Algorithm[J]. Laser & Optoelectronics Progress, 2020, 57(24): 241020
- Laser & Optoelectronics Progress
- Vol. 57, Issue 24, 241020 (2020)
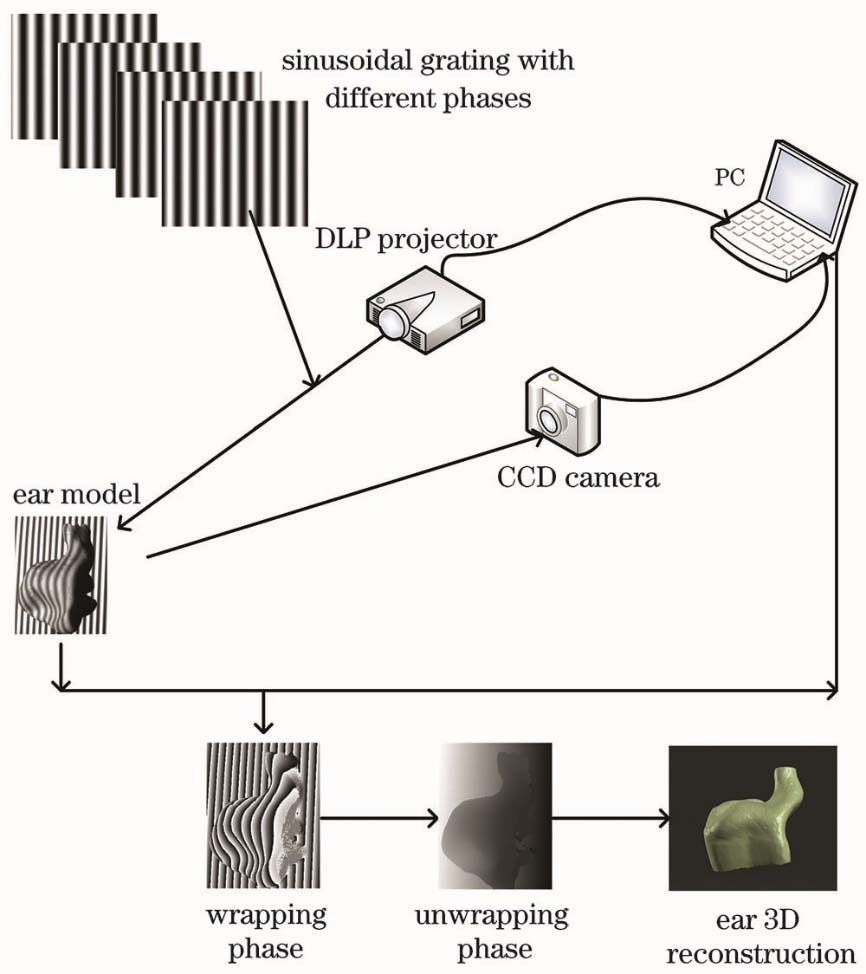
Fig. 1. Schematic diagram of the structured light 3D reconstruction system
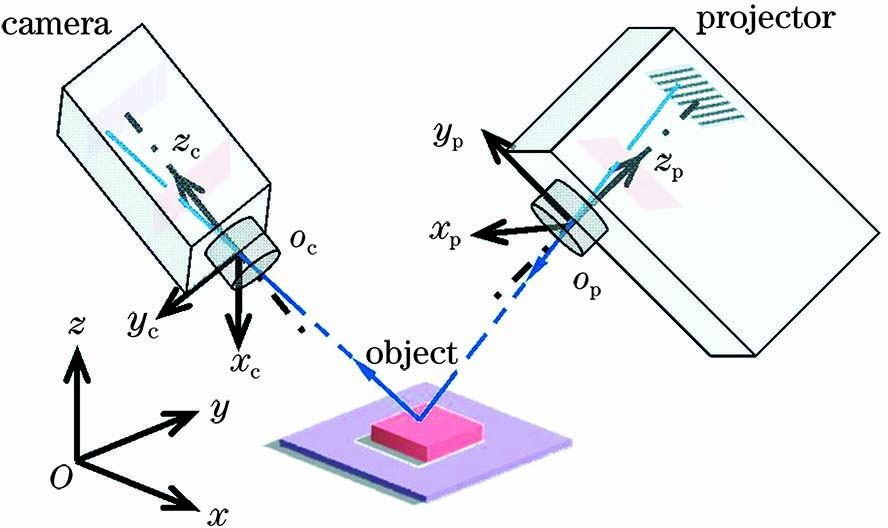
Fig. 2. Schematic diagram of the triangulation method
Fig. 3. Reliability value between adjacent pixels. (a) Reliability value of a single pixel; (b) reliability value of the expanded path
Fig. 4. Process of reliability sequencing. (a) First time; (b) second time; (c) third time; (d) fourth time
Fig. 5. Edge detection results of the three operators. (a) Laplacian operator; (b) LoG operator; (c) Canny operator
Fig. 6. Process of edge detection processing. (a) Ear modulation map with missing information; (b) image obtained after NMS processing; (c) image obtained after edge processing
Fig. 7. Flow chart of phase unwrapping
Fig. 8. Error analysis of phase unwrapping. (a) 3D description of the phase function; (b) phase unwrapping errors of different algorithms
Fig. 9. Phase unwrapping results of our algorithm in different environments. (a) Ideal situation; (b) random noise; (c) information loss; (d) random noise and information loss
Fig. 10. Physical map of the built system
Fig. 11. Image and ear model modulation after the raster is expanded. (a) Unfolded image of grating phase; (b) modulated grating image of ear model
Fig. 12. Results obtained by the Goldstein branch cutting method. (a) 2D image of the ear model; (b) ear model after phase expansion; (c) true height of the ear model
Fig. 13. Wrapping phase and phase unfolding diagrams of the two algorithms. (a)-(b) Least square method; (c)-(d) our algorithm
Fig. 14. Phase unwrapping results of the two algorithms. (a) Least squares algorithm (2D); (b) our algorithm (2D); (c) least squares algorithm (3D); (d) our algorithm (3D)
Fig. 15. Cochlear model obtained by 3D reconstruction
|
Table 1. Phase unfolding time of our algorithm in different environments unit: s

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20