
Xiaoyue Qiao, Xin Chen, Guoqing Ding, Xiaoyu Cai, Jiasi Wei, Yuan Li. Scheme for Position Self-Calibration Based on Least Square Method[J]. Acta Optica Sinica, 2018, 38(12): 1212001
- Acta Optica Sinica
- Vol. 38, Issue 12, 1212001 (2018)
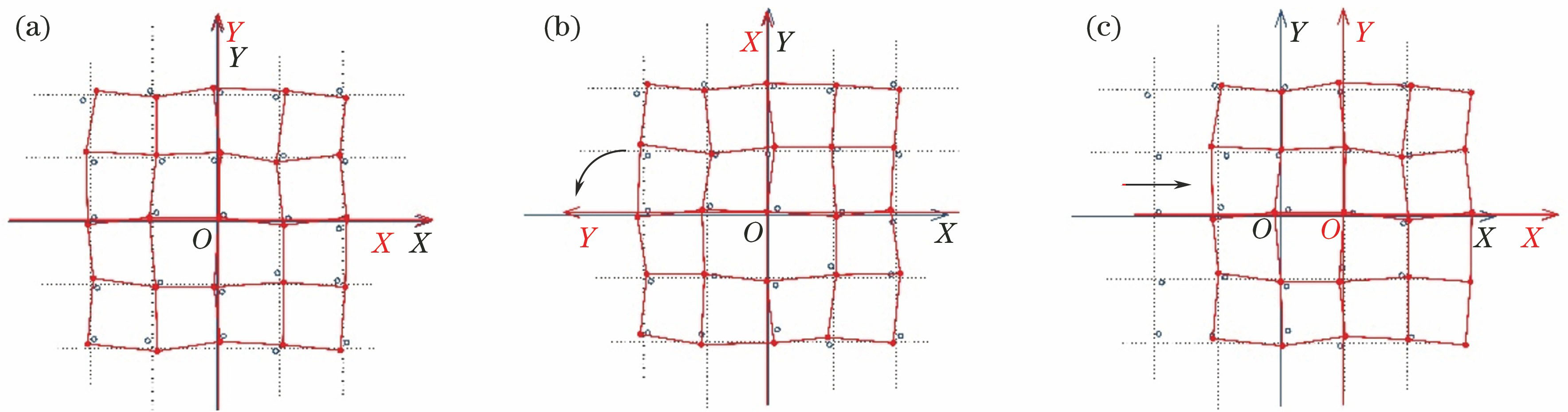
Fig. 1. Schematic of positions of grid plate for self-calibration. (a) Initial position; (b) rotation of 90°; (c) translation
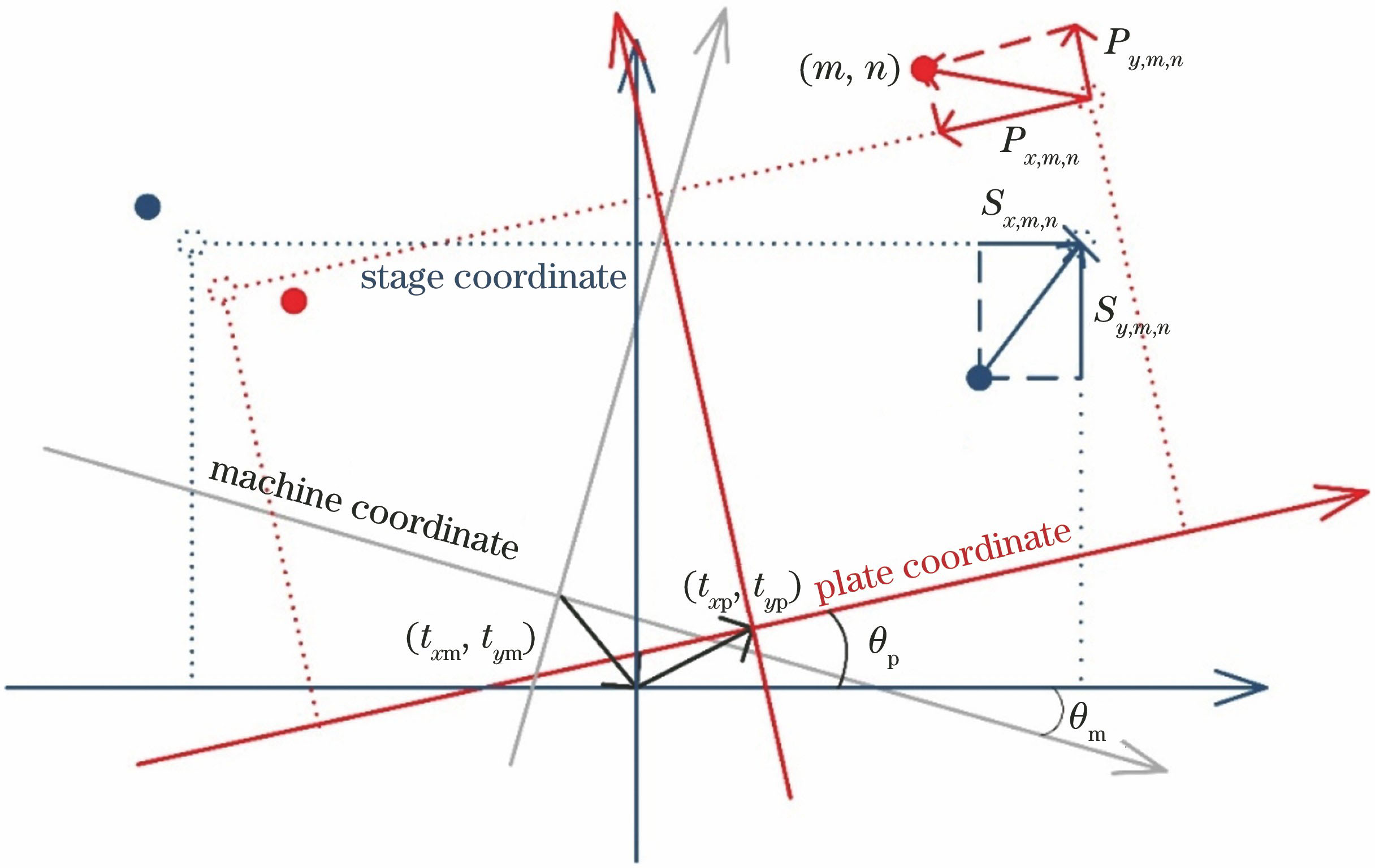
Fig. 2. Schematic of variables for self-calibration
Fig. 3. True values and calculated errors of stage system without noise. (a) Program 1: initial position+rotation of 90°+translation; (b) program 2: initial position+rotation of 180°+translation
Fig. 4. Self-calibration results of stage with noise
|
Table 1. Rank of relation matrix for one position
|
Table 2. Rank of relation matrix for two positions
|
Table 3. Rank of relation matrix for three positions
|
Table 4. Rank of relation matrix for four positions

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20