
Zhenyang Hui, Tieding Lu, Youjian Hu, Xianyu Yu, Yuanping Xia. Airborne LiDAR Point Cloud Filtering Algorithm Based on Dynamic Threshold[J]. Laser & Optoelectronics Progress, 2019, 56(6): 062802
- Laser & Optoelectronics Progress
- Vol. 56, Issue 6, 062802 (2019)
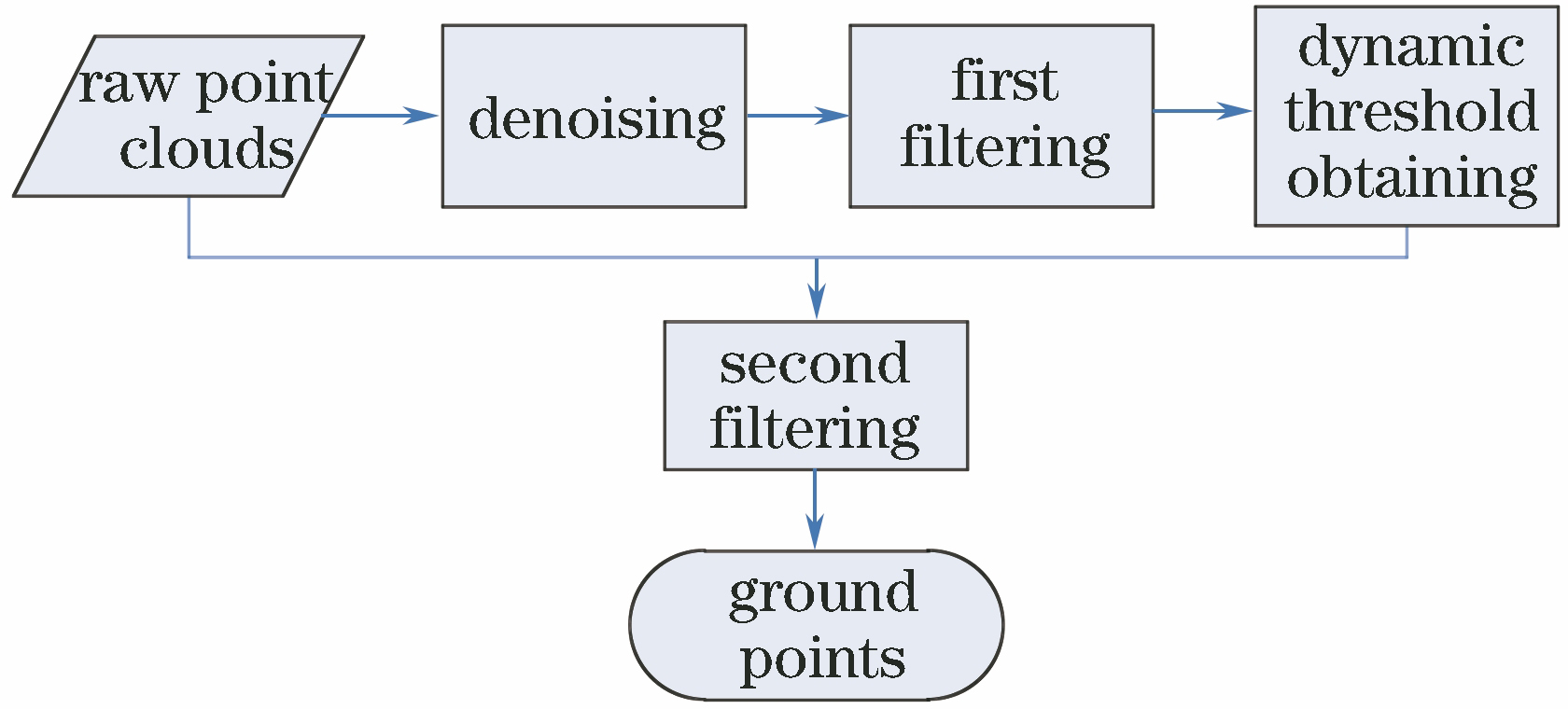
Fig. 1. Flow chart of proposed algorithm
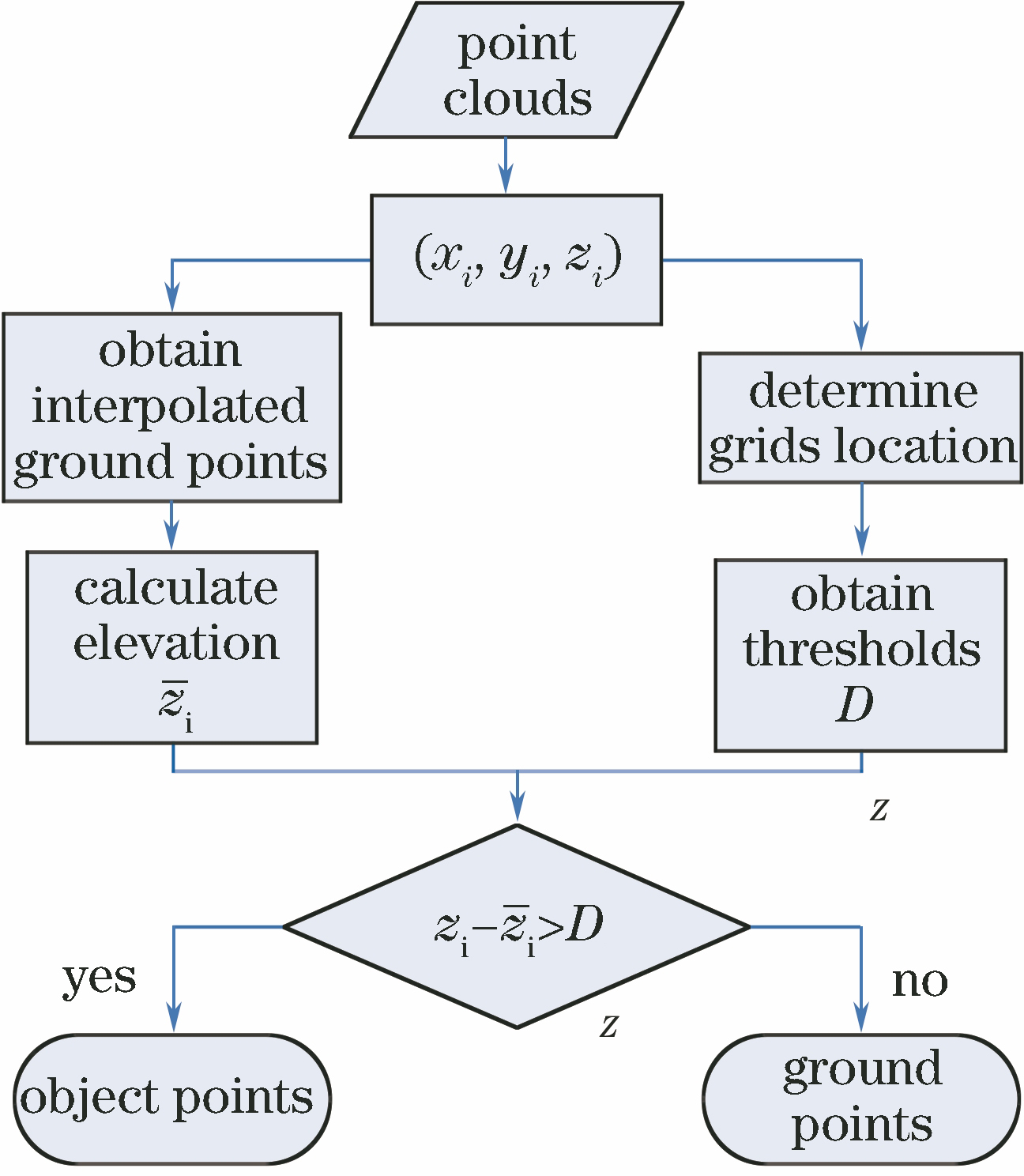
Fig. 2. Flow chart of second filtering algorithm
Fig. 3. Three-dimensional image of original point cloud
Fig. 4. Ground point cloud after first filtering
Fig. 5. Ground point cloud after second filtering
Fig. 6. Three-dimensional surfaces of point cloud. (a) Before filtering; (b) after filtering
Fig. 7. Qualitative analysis of filtering results. (a) Digital surface model of original point cloud; (b) digital elevation model of true groud points; (c) digital elevation model after filtering by proposed algorithm; (d) error distribution of point cloud
|
Table 1. Accuracy assessment of filtering%
|
Table 2. Accuracy comparison among filtering algorithms%
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Error comparison of filtering results%

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20