
Xiaobin Li, Zuhong Liang, Yong Li, Qi Xiao, You Zhou. Tilt Photography and Lidar Three-Dimensional Scanning for Route Spatial Relationship Detection[J]. Laser & Optoelectronics Progress, 2021, 58(16): 1628003
- Laser & Optoelectronics Progress
- Vol. 58, Issue 16, 1628003 (2021)
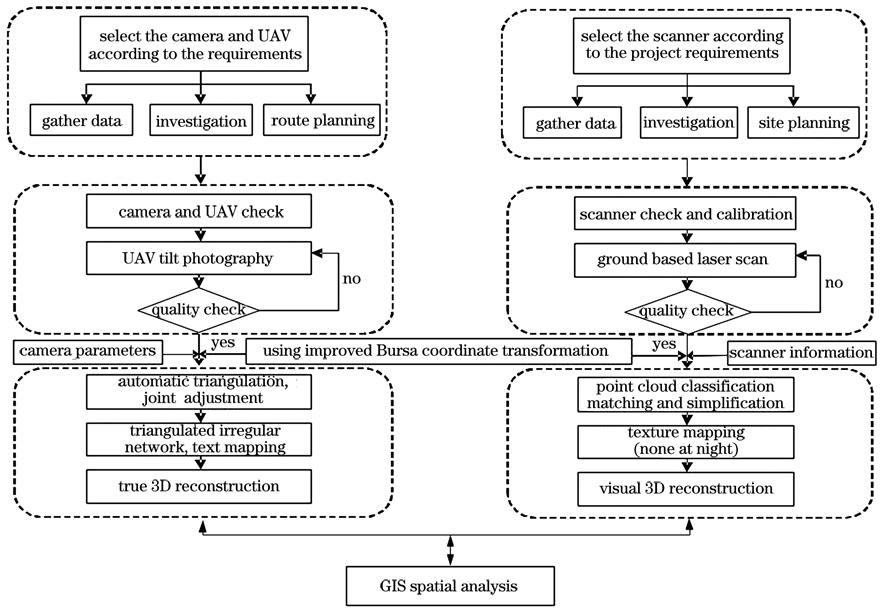
Fig. 1. Flow chart of the data fusion
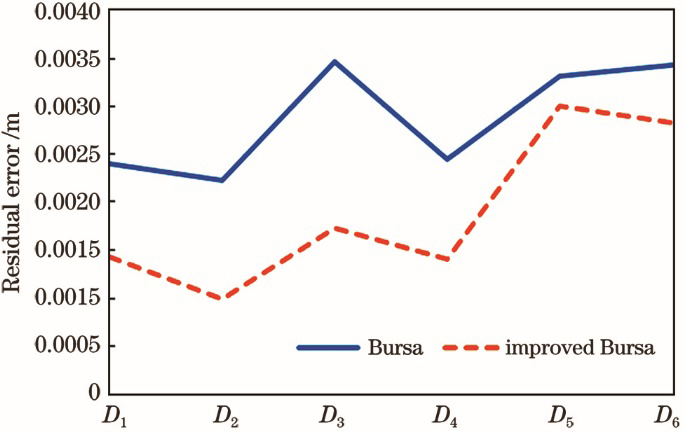
Fig. 2. Residual error of the coordinate transformation point
Fig. 3. Scanning result of the point cloud. (a) Point cloud 1; (b) point cloud 2
Fig. 4. True 3D model based on tilt photography
Fig. 5. True 3D model based on laser point cloud and tilt photography
Fig. 6. Spatial relationship of the route
Fig. 7. Measured spatial relationship of the route
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Residual table of the improved algorithm unit: m
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Precision of the field survey unit: m

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20