
Junshi Xue, Ningbo Guo, Sheng'en Liu. New Non-Iterative Method for Pose Estimation with High Precision[J]. Acta Optica Sinica, 2018, 38(7): 0715001
- Acta Optica Sinica
- Vol. 38, Issue 7, 0715001 (2018)
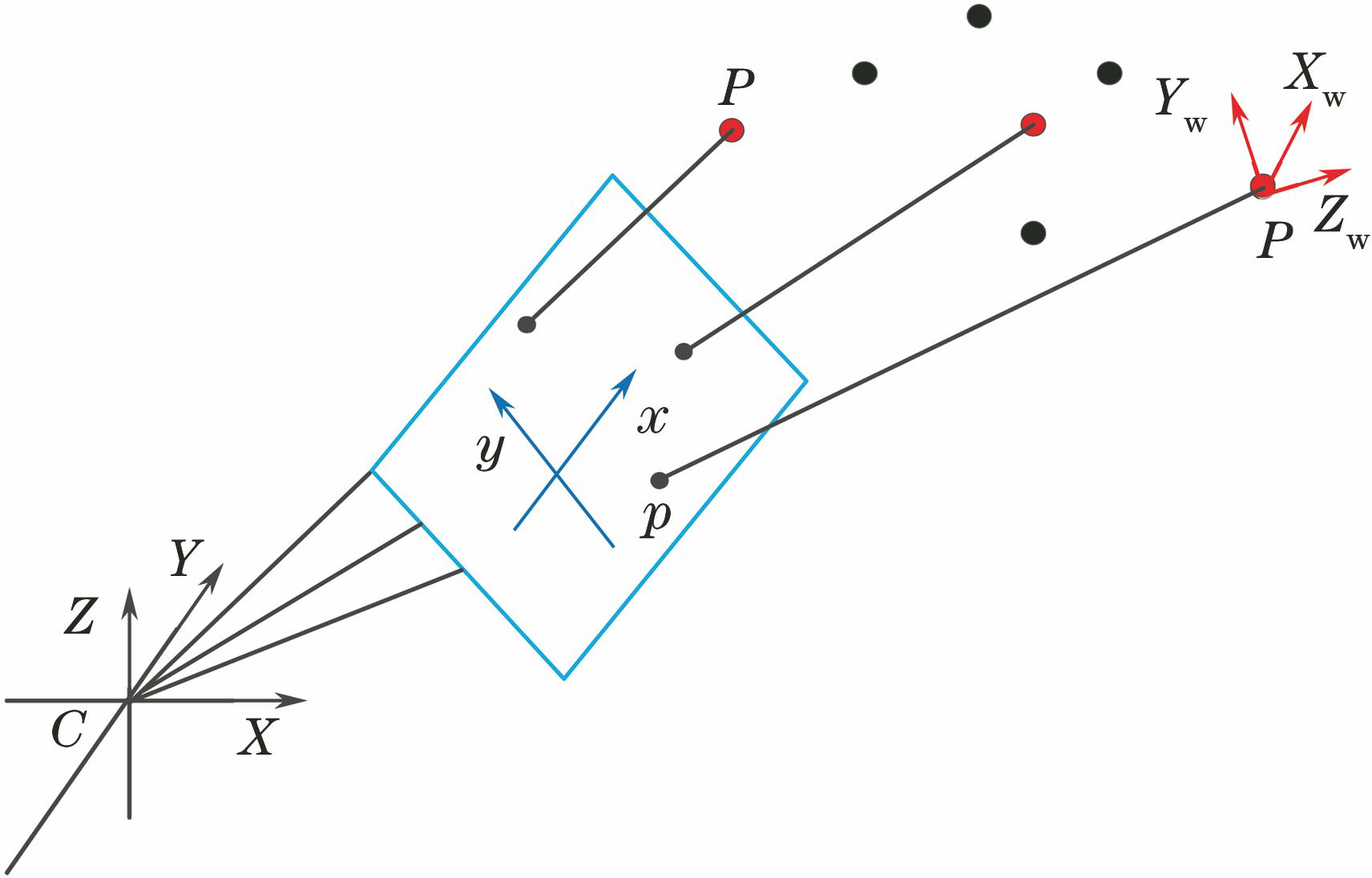
Fig. 1. Camera pose estimation problem
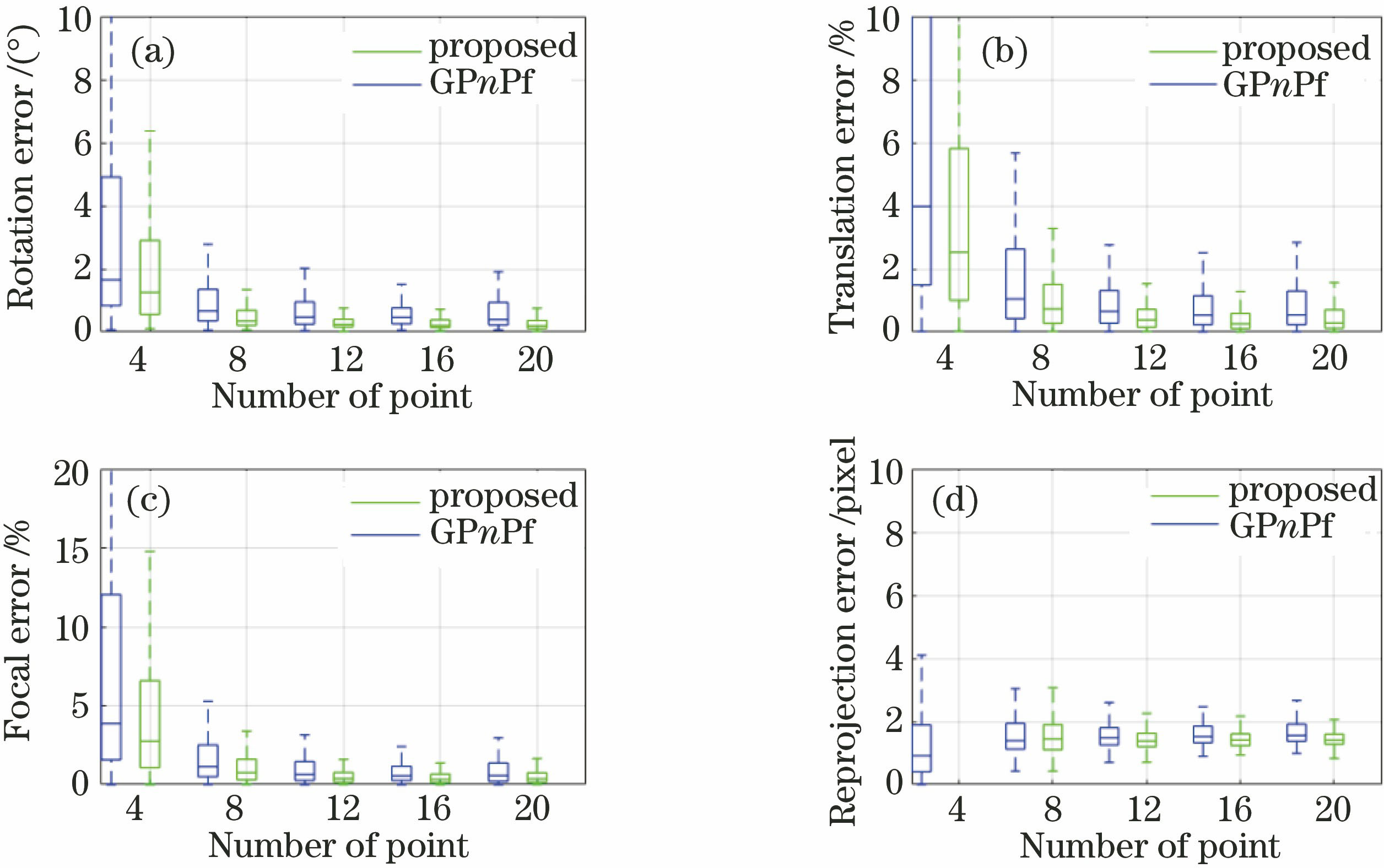
Fig. 2. 200 times experimental results with respect to varying number of points. (a) Rotation matrix error; (b) translation matrix error; (c) focal error; (d) reprojection error
Fig. 3. 200 times experimental results with respect to varying noise level. (a) Rotation matrix error; (b) translation matrix error; (c) focal error; (d) reprojection error
Fig. 4. Computation time with respect to varying number of point
Fig. 5. SIFT points and matching lines
Fig. 6. SIFT and reprojection points
Fig. 7. 3D reconstruction result of unmanned aerial vehicle dataset
Fig. 8. 3D reconstruction result of CastleP30 dataset
|
Table 1. Estimation results of calibration matrix with different datasets
|
Table 2. Estimation error of different datasets

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20