
Hanyu Ling, Peiyuan Wang. Method for Camera Pose Estimation Based on Weighted Optimization of Objective Functions[J]. Laser & Optoelectronics Progress, 2019, 56(4): 041503
- Laser & Optoelectronics Progress
- Vol. 56, Issue 4, 041503 (2019)

Fig. 1. Schematic of object-space and image-space collinearity errors
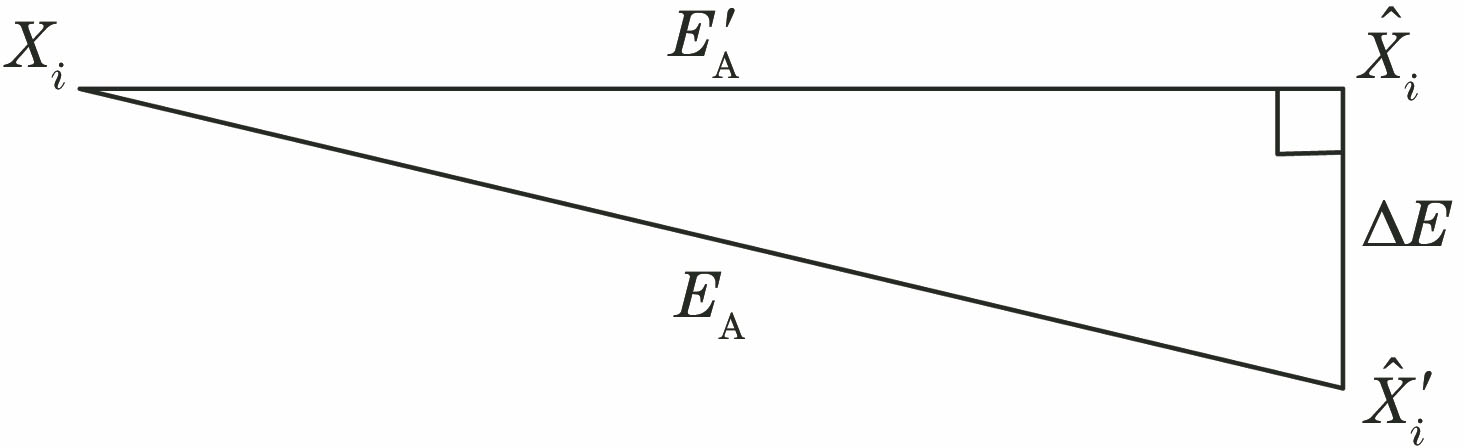
Fig. 2. Comparison of object-space collinearity errors for different methods
Fig. 3. Schematic of image noise and errors
Fig. 4. Precision comparison among all algorithms. (a) Mean rotation error; (b) median rotation error; (c) mean translation error; (d) median translation error
Fig. 5. Robustness comparison among all algorithms when point number is 4. (a) Mean rotation error; (b) median rotation error; (c) mean translation error; (d) median translation error
Fig. 6. Robustness comparison among all algorithms when point number is 5. (a) Mean rotation error; (b) median rotation error; (c) mean translation error; (d) median translation error
Fig. 7. Schematic of matching relation for SIFT algorithm
Fig. 8. Experimental results of real image. (a) Reference image; (b) input image
|
Table 1. Real experimental resultspixel

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20