
Yang Peng, Liu Deer, Liu Jingyu, Zhang Heyuan. Mine Ground Point Cloud Extraction Algorithm Based on Statistical Filtering and Density Clustering[J]. Laser & Optoelectronics Progress, 2020, 57(2): 21107
- Laser & Optoelectronics Progress
- Vol. 57, Issue 2, 21107 (2020)
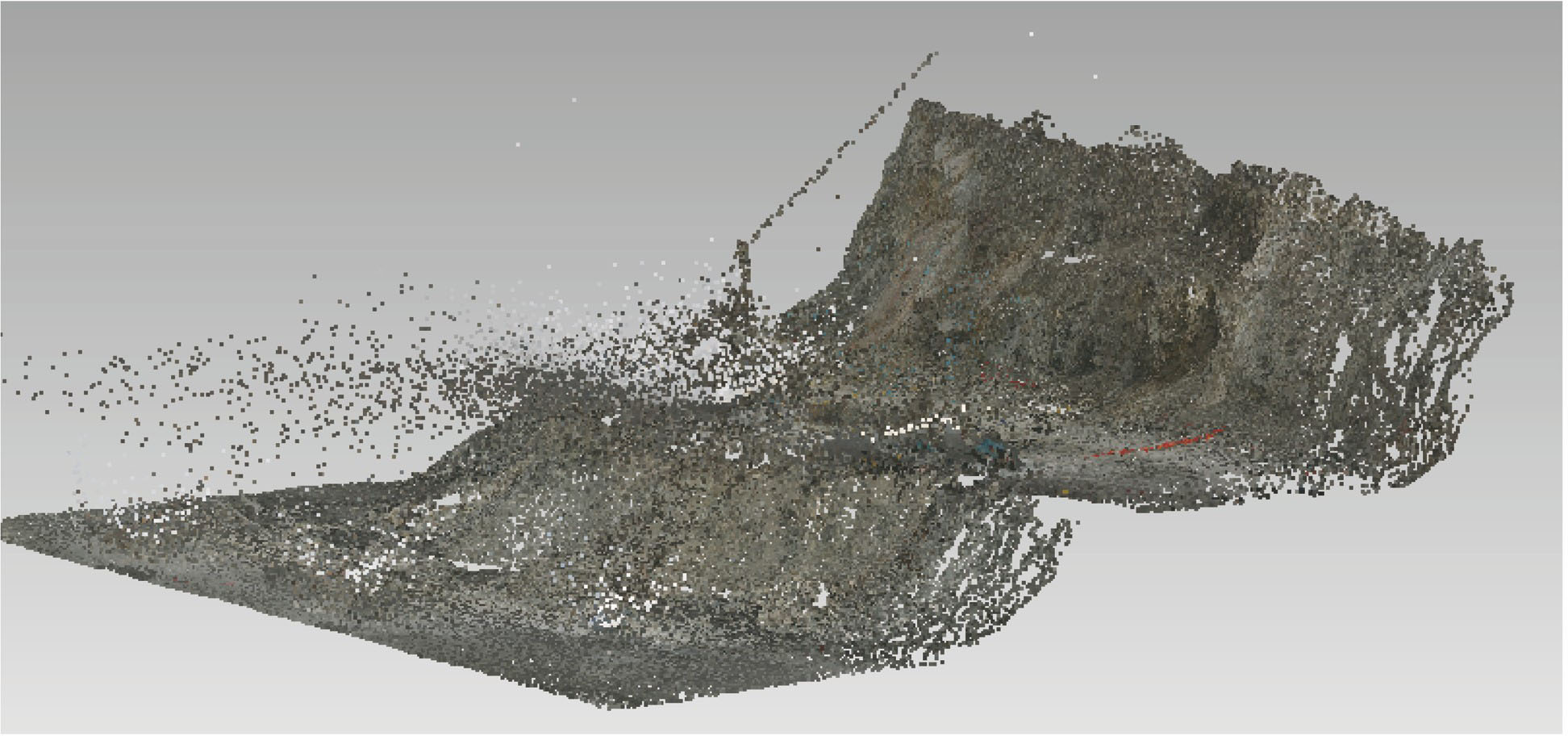
Fig. 1. Original point cloud
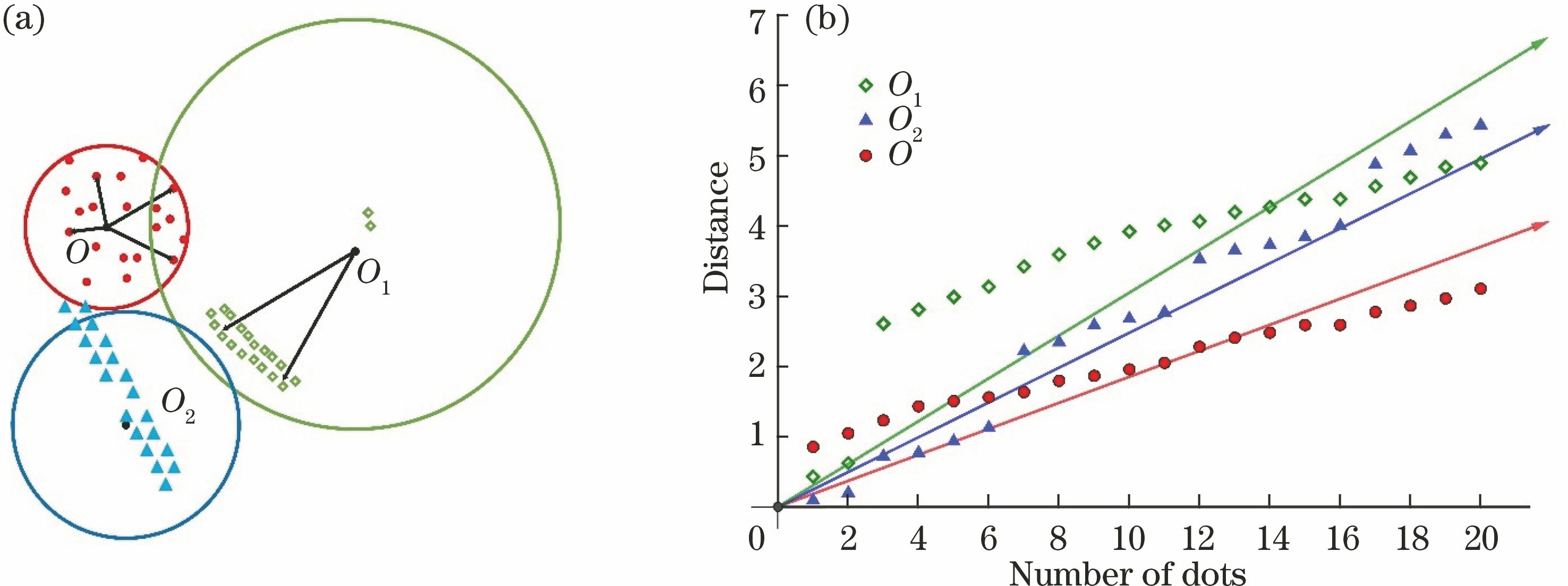
Fig. 2. Spatial distribution of noise. (a) Plane point cloud map; (b) distance map of neighbor points
Fig. 3. Flow chart of proposed algorithm
Fig. 4. Characteristic density distributions of 10 points in neighborhood
Fig. 5. Characteristic density distributions of 20 points in neighborhood
Fig. 6. Characteristic density distributions of 30 points in neighborhood
Fig. 7. Characteristic density distributions of 40 points in neighborhood
Fig. 8. Extracted results. (a) Original point cloud; (b) 10 neighbor points; (c) 20 neighbor points; (d) 30 neighbor points; (e) 40 neighbor points
Fig. 9. Experimental results and accuracy. (a) Trend of slope difference; (b) trend of accuracy difference; (c) number of ground point clouds; (d) error curves
Fig. 10. Extraction results of radius filter, voxel filter, and statistical filter
Fig. 11. Extraction results based on Method-Library. (a) After denoising in front view; (b) after denoising in side view
Fig. 12. Extraction results of large-area point cloud. (a) Before denoising in front view; (b) after denoising in front view; (c) before denoising in side view; (d) after denoising in side view
|
Table 1. Extraction results under different numbers of neighbor points
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Extraction results of other algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20