
Jun Wu, Meimiao Zhang, Shaoyu Liu, Yuheng Zhu, Shaobo Yuan. Calibration Method for Multicamera System Based on Rotating Calibration Plate[J]. Laser & Optoelectronics Progress, 2022, 59(17): 1712002
- Laser & Optoelectronics Progress
- Vol. 59, Issue 17, 1712002 (2022)
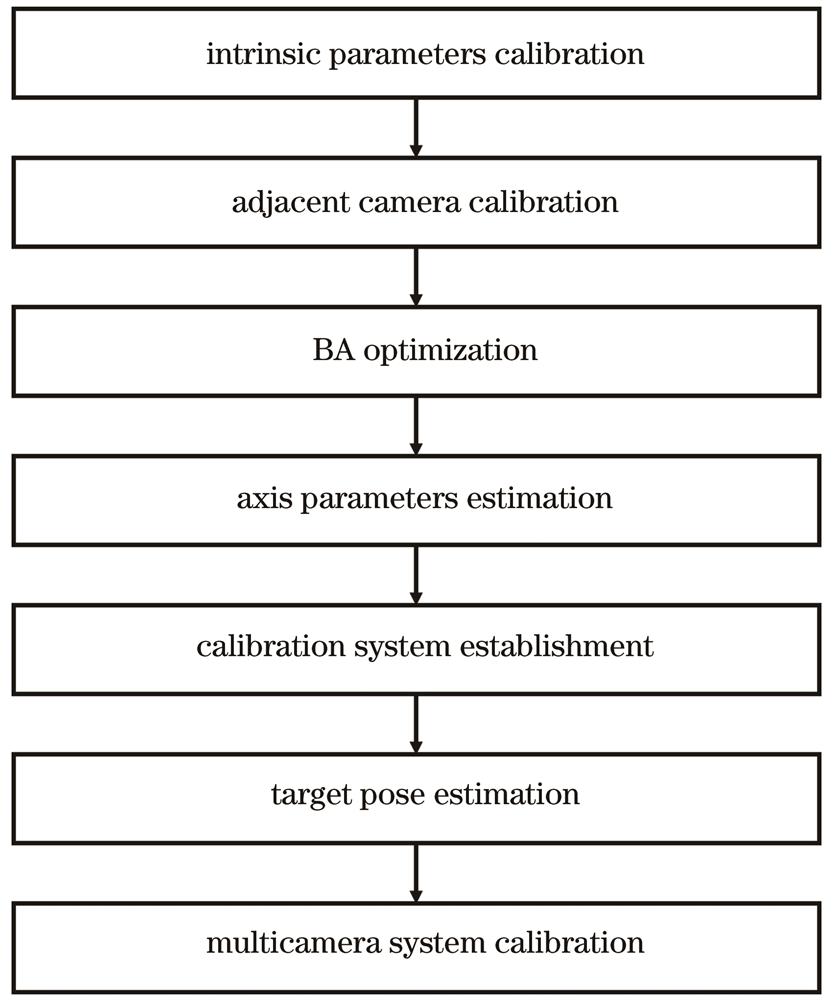
Fig. 1. Calibration flow chart
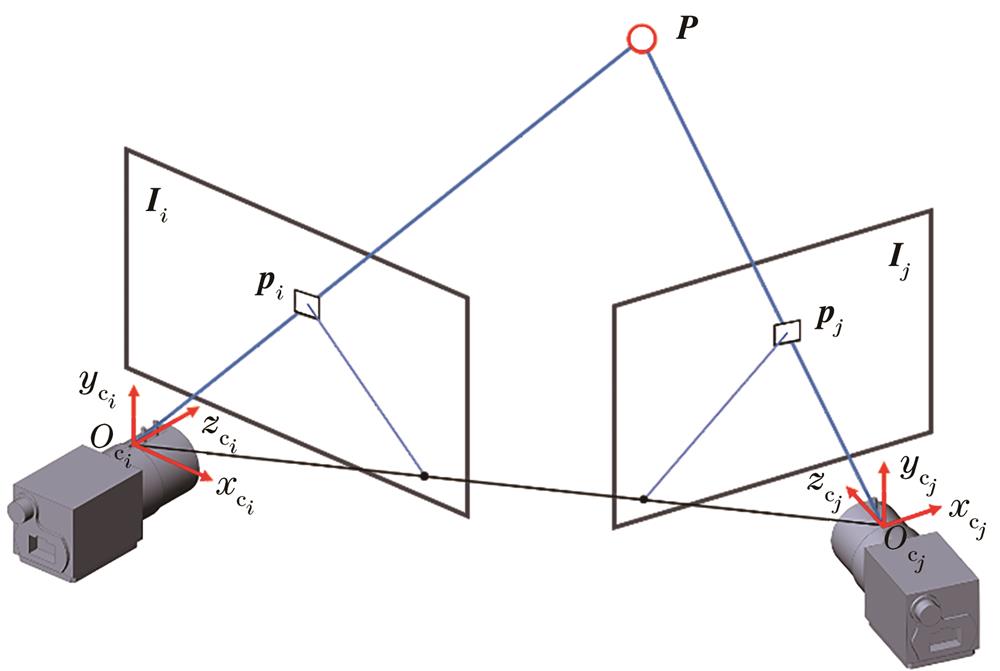
Fig. 2. Diagram of epipolar geometry
Fig. 3. Diagram of BA optimization
Fig. 4. Diagram of rotation axis calibration
Fig. 5. Diagram of PnP algorithm
Fig. 6. Diagram of camera calibration
Fig. 7. Diagram of multicamera error optimization
Fig. 8. Experimental device diagram
Fig. 9. Result of axis circle fitting
Fig. 10. Comparison of multicamera external parameter calibration. (a) Yaw; (b) pitch; (c) roll; (d) tx direction; (e) ty direction; (f) tz direction
Fig. 11. Reprojection error of multicamera system calibration
Fig. 12. Large-scale measurement experimental device diagram
Fig. 13. Schematic diagram of the position of camera i
Fig. 14. Roundness error
Fig. 15. Model of PnP algorithm
Fig. 16. Reconstruction of checkerboard experimental device diagram
Fig. 17. Reprojection error of PnP algorithm. (a) h=1000 mm; (b) h=1500 mm; (c) h=2000 mm; (d) h=2500 mm
Fig. 18. External parameter calibration model of binocular camera
Fig. 19. Attitude error results. (a) Yaw direction; (b) pitch direction; (c) roll direction
Fig. 20. Position error results. (a) tx direction; (b) ty direction; (c) tz direction
|
Table 1. Axis plane fitting and circle fitting
|
Table 2. Rotation radius fitting results

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20