
Xiaoyan Yang. Point Set Registration Method Based on Symmetric Kullback-Leibler Divergence[J]. Laser & Optoelectronics Progress, 2020, 57(8): 081022
- Laser & Optoelectronics Progress
- Vol. 57, Issue 8, 081022 (2020)
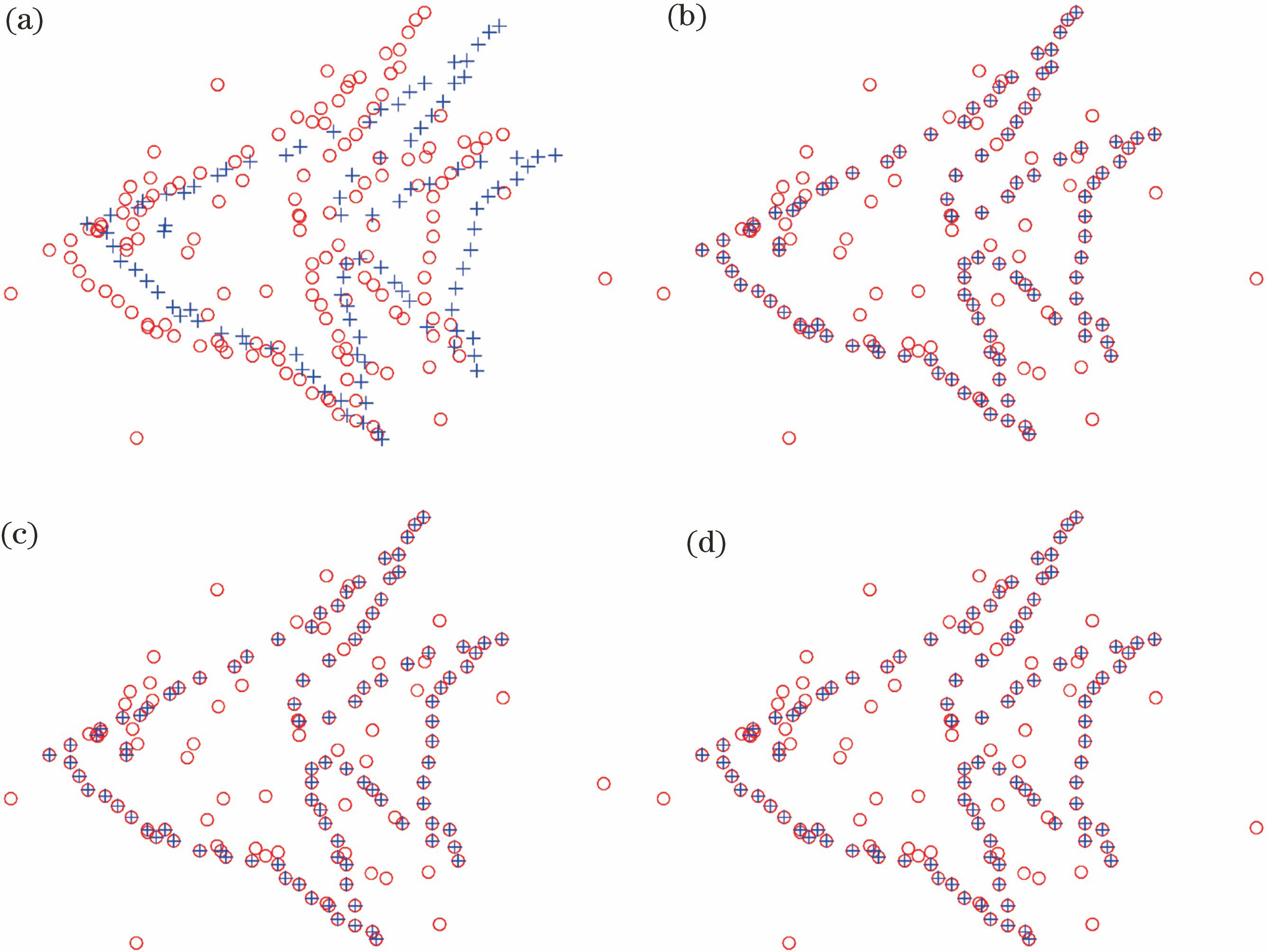
Fig. 1. Registration results of different algorithms at outlier ratio of 20%. (a) Original point set; (b) result of KC algorithm; (c) result of CPD algorithm; (d) result of SKL algorithm
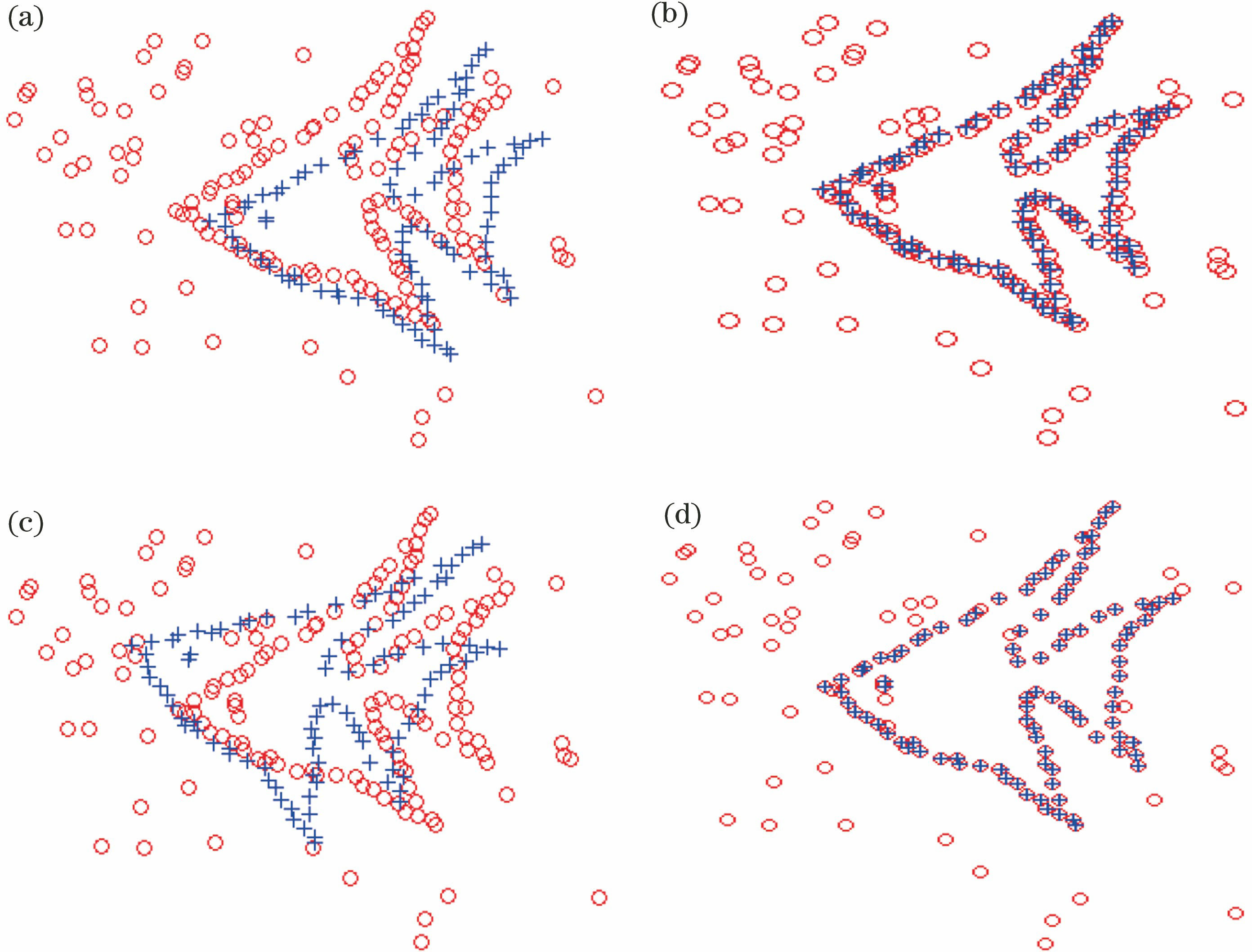
Fig. 2. Registration results of different algorithms at outlier ratio of 80%. (a) Original point set; (b) result of KC algorithm; (c) result of CPD algorithm; (d) result of SKL algorithm
Fig. 3. Registration results of different algorithms at noise ratio of 20%. (a) Original point set; (b) result of KC algorithm; (c) result of CPD algorithm; (d) result of SKL algorithm
Fig. 4. Registration results of different algorithms at noise ratio of 80%. (a) Original point set; (b) result of KC algorithm; (c) result of CPD algorithm; (d) result of SKL algorithm
Fig. 5. Registration accuracy under different outlier ratios. (a) Registration success rate; (b) MSE
Fig. 6. Registration accuracy under different noise ratios. (a) Registration success rate; (b) MSE

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20