
Yanping Liu, Chong Wang, Haiyun Xia. Application Progress of Time-Frequency Analysis for Lidar[J]. Laser & Optoelectronics Progress, 2018, 55(12): 120005
- Laser & Optoelectronics Progress
- Vol. 55, Issue 12, 120005 (2018)
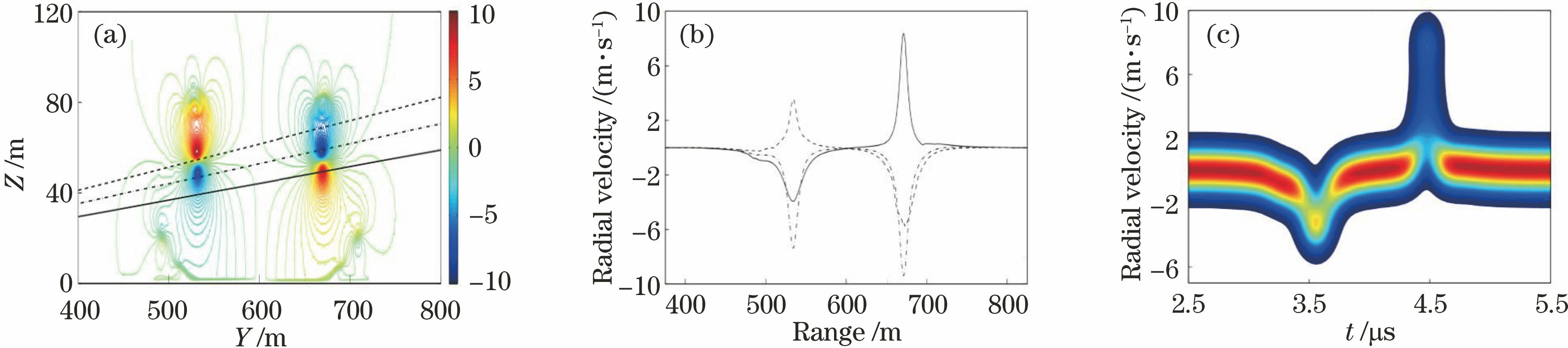
Fig. 1. Simulation results of tail vortex and Wigner-Ville distribution of radial velocity profiles. (a) Numerical simulation diagram of contour plot of tail vortex pair; (b) three radial velocity profiles of line of slight; (c) average Wigner-Ville distribution of black solid lines in fig. (b)
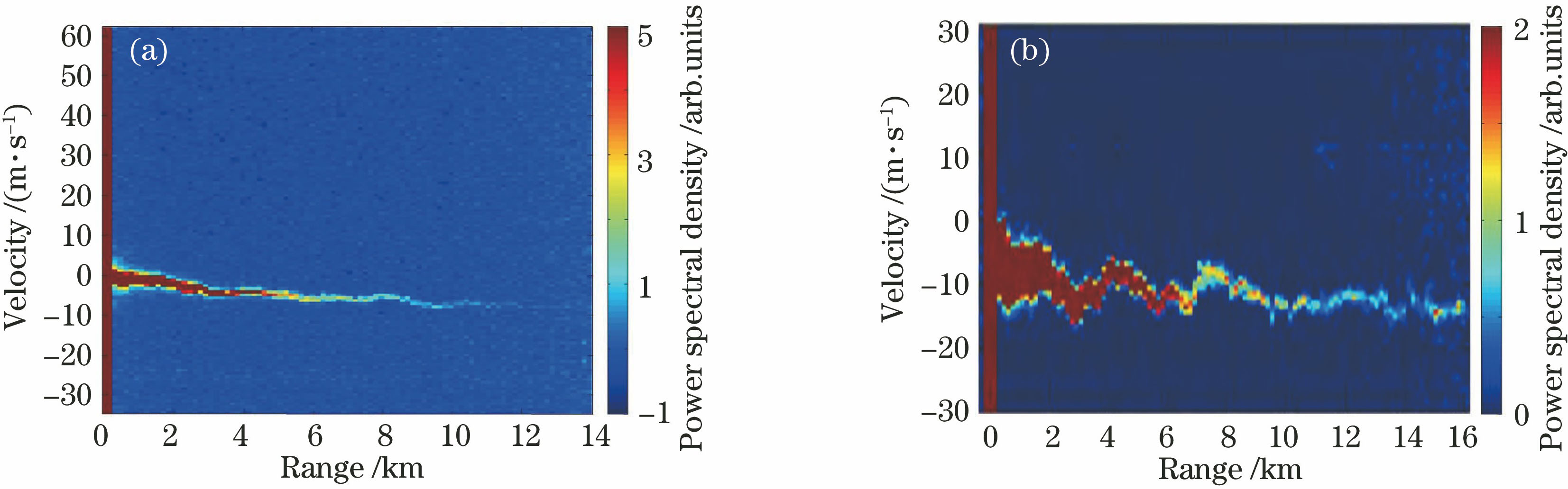
Fig. 2. Spectral images of wind speed varying with distance. (a) 1.5 μm all-fiber single frequency lidar; (b) long-distance Doppler lidar
Fig. 3. Reconstruction results of 2D wavelet. (a) Original relative temperature perturbations from July 16 to 18, 2014; (b) reconstruction period of 3.6 h; (c) reconstruction period of 4.8 h; (d) reconstruction period of 7.8 h; (e) the temperature perturbation field reconstructed from combining the above three major wave packets
Fig. 4. Gravity wave perturbations (a)-(c) and distribution function of spectral energy (d)-(f). (a) Initial temperature perturbations; (b) waves with upward phase progression; (c) waves with downward phase progression; (d) Vertical wavelength versus phase velocity; (e) vertical wavelength versus period; (f) altitude versus vertical wavelength
Fig. 5. Comparison of wind shear distribution between simulation results and actual measurements. (a) Simulation results; (b) actual measurements
Fig. 6. Comparison diagrams of inversion results. (a) Original and denoised data; (b) denoised data and average of 1000 sets of accumulative signals
Fig. 7. Spectral distribution of backscatter signals
Fig. 8. Comparison of the spectrogram results. (a) Spectrogram and oscillogram of an original LDV signal; (b) spectrogram and oscillogram of a Wiener filtered signal; (c) spectrogram and oscillogram of a clean signal
Fig. 9. THI displays of water-vapor mixing ratio recorded from 2016-09-22T00:00 to 2016-09-23T00:00 before and after denosing. (a) Before denoising; (b) after denoising
Fig. 10. Spectrograms of the received signals from the targets at 250 m. (a) Stationary target; (b) moving target
Fig. 11. Test results of Gabor wavelet transform. (a) Tile 1 original data; (b) Tile 1 segmented result; (c) Tile 2 original data; (d) Tile 2 segmented result
Fig. 12. Comparison of segmented trees and buildings using matching pursuit method. (a) Trees; (b) buildings; (c) tree area detected by an 11×11 window; (d) building area detected by an 11×11 window; (e) tree area detected by a 7×7 window; (f) building area detected by a 7×7 window
Fig. 13. Spectrogram results. (a) Normalized spectrogram of the target speed versus time with tone spacing of 10 GHz; (b) velocity spectrogram after hard threshold processing
Fig. 14. Airplane model and imaging results based on two methods. (a) Optical photo of the airplane model made of stone; (b) image result based on the FFT(fast Fourier transformation) method; (c) azimuth multilook result based on the FFT method; (d) azimuth multilook result based on the JTFT method
Fig. 15. Spectrogram of walking person
|
Table 1. Approximate peak to LO noise performances for continuous wave coherent lidar
|
Table 2. Comparison of various time-frequency analysis methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20