
Ling Fu, Dingshan Gao. Research on highly dynamic 3D measurement method based on RGB color fringe projection[J]. Journal of the European Optical Society-Rapid Publications, 2023, 19(2): 2023040
Journals >Journal of the European Optical Society-Rapid Publications >Volume 19 >Issue 2 >Page 2023040 > Article
- Journal of the European Optical Society-Rapid Publications
- Vol. 19, Issue 2, 2023040 (2023)
Abstract
Keywords
1 Introduction
Structured light-based 3D measurement technology is commonly used in many fields, such as industrial inspection, restoration of cultural relics, and reconstruction of circuit structures because of its high efficiency and accuracy, as well as ease of operation [
The hardware solution to the high-reflection problem was introduced first. The saturated region of the specular reflection blocks any fringe pattern, resulting in a loss of depth information. Therefore, Salahieh et al. [
Next, a software solution to the high-reflection problem was introduced in the literature. Zhang and Yau [
Furthermore, the use of color composite stripes to obtain the 3D shape of the subject has been widely studied to reduce the number of image shots and increase the measurement speed [
Along these lines, in this work, an adaptive stripe projection technique based on RGB channels was proposed for conducting HDR 3D measurement of high light objects. The MIGL of the fringe map was locally adjusted according to the reflectance distribution of the object surface, and the fringe map with MIGL 255 was projected onto the unsaturated object area. At the same time, in order to avoid pixel saturation, the fringe map with low MIGL is projected on the saturated area. Compared with the previously reported adaptive fringe projection techniques in the literature [
The rest of this work is organized as follows. In Section 2, the principles of the RGB channel-based adaptive fringe projection system are presented. In Section 3, the experiments and accuracy analysis are described, and in Section 4 the full text is summarized.
2 Measurement principle
2.1 Color composite stripes
A color image contains information in three channels: red, green and blue, while a black and white image generally has information in only one of these channels. Unlike monochromatic sine stripes, color composite sine stripes have three channels of information, each of which can contain a monochromatic sine stripe of one frequency. This means that a projector projecting a color composite sine stripe image is equivalent to projecting three monochromatic sine stripe images at the same time, hence greatly reducing projection time and increasing measurement speed.
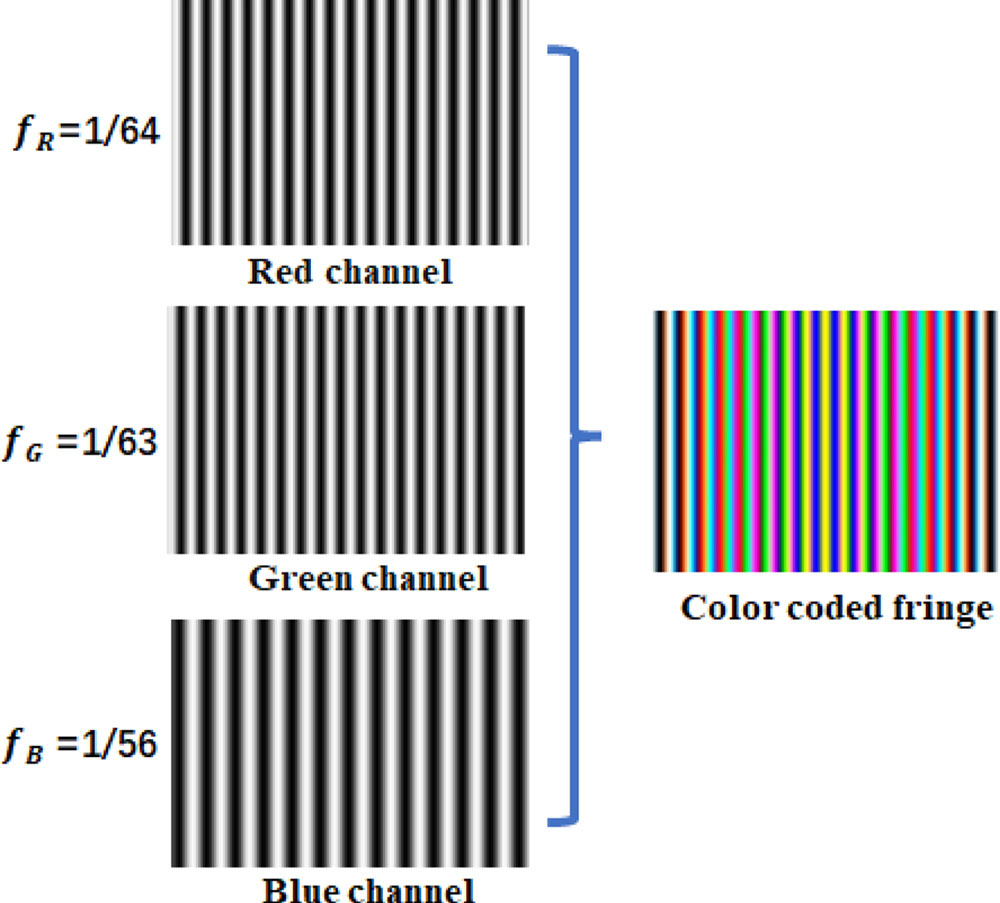
The color composite stripe proposed in this work used the RGB model, and each color composite stripe map was compounded by three channels, R, G, and B, as is shown in
![]()
Figure 1.Schematic diagram of the colored composite stripe generation.
IR (x, y), IG (x, y), and IB (x, y) are the fringe projection light intensity in the three channels of the projector RGB, a(x, y) denotes the ambient light intensity, b(x, y) refers to the fringe modulation intensity, fR, fG, and fR represent the fringe frequencies in the three channels, whereas the three frequencies used in this work were 1/64, 1/63, and 1/56.
After generating the color composite stripes, they were recorded into the projector. Then, they were projected onto the surface of the subject by the projector, and the deformed stripes were collected by the color CCD camera. However, this article used the RGB model, and crosstalk issues can certainly occur between the three channels. The problem of stringing originates essentially due to signal coupling that causes interference noise to another channel. The band of color images that appeared at the output image of the RGB image is separated by the image overlap. The RGB channel skewers are the most common issue in the Bayer filter camera, because after using the color difference algorithm, the RGB value assigned by each pixel will be mixed with adjacent pixels, causing hence the color of the neighboring pixels to change the essence. To eliminate the RGB color bruises of the color camera, the color camera should be calibrated [
2.2 Improved adaptive stripe projection technology
Adaptive stripe projection is a technology that can measure the three-dimensional contour of high-light objects. Particularly, the best gray value of each pixel that throws a striped pattern can be calculated. The optimal grayscale value was obtained to generate adaptive stripes and inhibit the high-counter-up areas on the surface of the object. The “adaptive measurement” mentioned in this work mainly refers to perform three-dimensional measurements on objects with large surface reflectances on the subject. This technology can calculate the best projection gray value in pixels. The specific steps are as follows: First, the pixel saturation area (i.e., the high anti-regional), was marked by the high anti-regional, which was designed to project the pure white map of 255 to the surface of the measured object and the camera to collect the image. A saturation threshold was set, such as the gray value 250, and then each pixel point gray value of the image was retrieved. If the gray value is greater than 250, the point corresponds to the saturation point, while if the gray value is less than or equal to 250 for normal pixels, the saturated pixels are set to 1, and the normal pixels are bound to 0. The formula is as follows:
Among them, M(u, v) is a binary matrix that is used to preserve the calculation results, and I(u, v) points to each pixel on the image taken by the camera. After determining the pixel saturation area, the optimal projection intensity of the calculation is required, mainly by building the camera’s intensity Ic and the mapping of the projection strength Ip, where the relationship between them is described in equation
The camera sensitivity k and the exposure time t are camera parameters, Ie indicates the ambient light of the object’s surface reflection, Ia denotes that the ambient light of the camera is directly entered into the camera, and the pixel coordinate of the camera image plane, and the pixel coordinates, and r(u, v) stands for the reflectivity of the measured object in the image coordinate system (u, v). Defining the optimal projection intensity as Io, and the ideal captured intensity as Is, letting Is = Ic, Io = Ip, Io can be calculated as equation
In this work, the ideal capture strength Is was set to 250, r(u, v), Ie, and Ia are unknown parameters. Since equation
From equation
According to equations
After getting the best projection grayscale, it is necessary to locate the corresponding position of all the best projection grayness on the projector coordinate system. The absolute phase of the orthogonal phase of the orthogonal direction can be calculated through the background of the Fourier transformer:
In equation
![]()
Figure 2.Flow diagram and experimental flow diagram of adaptive technology.
In this work, to effectively address the problem of the traditional adaptive fringe projection technology, which needs to project a large number of fringes to establish the mapping relationship between the camera coordinate system and the projector coordinate system, Fourier transform contouring based on background normalization was used to replace the phase-shifting method used by the traditional adaptive technology. Based on the comparative advantages of the background normalization Fourier transform contouring [
3 Experiment and precision analysis
The experimental instruments mainly include a projector and a color CCD camera, the system is displayed in
![]()
Figure 3.Measuring system picture.
The traditional adaptive fringe projection technique uses the four-step phase-shift method and the three-frequency heterodyne method to match the camera coordinate system and the projector coordinate system, which requires at least 24 images. However, the proposed method only required three images to complete the step. Two horizontal and vertical color composite fringe images were used to establish the mapping relationship between the camera and the projector, and one blank image was utilized to remove zero frequency by background normalization Fourier transform contouring. The specific experimental operations are as follows.
To solve the crosstalk problem of the color camera, the crosstalk matrix of the measurement system must be solved before measuring the object with high reflection. The pure red light, pure green light, and pure blue light were projected on the white board successively. The color camera collected the blank picture and solved the crosstalk matrix, as shown in
![]()
Figure 4.(a) Pure red light is projected onto the plate. (b) Pure green light is projected onto the plate. (c) Pure blue light is projected onto the plate.
The crosstalk matrix
Generally speaking, the crosstalk matrix
In this work, a measurement method with fewer images and high efficiency was proposed to solve the problem of high reflectivity of objects. Therefore, some objects with high reflectance areas were selected. As can be seen in
![]()
Figure 5.(a) Picture of the measured object. (b) Monochromatic sinusoidal fringes projected onto the measured object.
An adaptive projection technique was used to suppress the high inverse region on the surface of the measured object. Equation
As illustrated in
![]()
Figure 6.Height inverse area of the measured object.
![]()
Figure 7.(a) Colored horizontal stripes are projected onto the measured object (b) colored vertical stripes are projected onto the measured object.
![]()
Figure 8.(a) R channel information of color horizontal stripes. (b) G channel information of color horizontal stripes. (c) B channel information of color horizontal stripes. (d) R channel information of color vertical stripes. (e) G channel information of color vertical stripes. (f) B channel information of color vertical stripes.
In
![]()
Figure 9.(a) Optimal projected gray level image. (b) Adaptive fringe image with frequency of 1/64. (c) Adaptive fringe image with frequency of 1/63. (d) Adaptive fringe image with frequency of 1/56.
The three adaptive fringe patterns in
![]()
Figure 10.Generation and projection of adaptive color coded fringe pattern.
After the color CCD camera acquired the image projected to the measured object by adaptive color coding, it was separated and corrected through three channels. The results are shown in
![]()
Figure 11.(a) Projective color composite fringe on the measured object. (b) Isolated red channel fringe. (c) Isolated green channel fringe. (d) Isolated blue channel fringe.
After obtaining the separated three-channel fringes of red, green and blue, the background normalized Fourier transform profilometry was used to solve the wrapping phase of the measured object, and the zero-frequency signal was eliminated using pure white, as can be ascertained from
![]()
Figure 12.(a) Measurement results of the proposed method. (b) Results of traditional background normalized Fourier transform contouring.
To verify the accuracy of the measurement method proposed in this work, a standard block with five steps, each of which is 5 mm in height, was measured. The picture of the color fringe projected on the step block is shown in
![]()
Figure 13.(a) The color fringe is projected onto the step block. (b) The measurement results of the step block with the proposed method.
The step block measurement results and error of the proposed method are presented in
By measuring the step blocks and analysing the root mean square error of each step, it can be seen that the accuracy of the proposed method can reach the value of 0.191 mm.
Compared with the methods in references [
4 Summarize
In this work, a novel method for measuring objects with high inverse regions was proposed. The method only needs one pure white image of the object, two horizontal and vertical color composite fringe images, as well as one color adaptive fringe image with the object to obtain the complete information of the object with a high inverse region. In striking contrast, the traditional adaptive technology requires many pictures to establish the mapping between the camera coordinate system and projector coordinate system, and the subsequent adaptive fringe measurement of objects requires a total of 36 fringe maps, while the proposed method only needed 4 maps. In the last part of the experiment, it was also proven that the proposed method can recover the information of the high inverse region of the measured object very well, avoid the loss of 3D data caused by overexposure, and remarkably improve the measurement efficiency.
References
[1] X. Liu, X. Peng, H. Chen et al. Strategy for automatic and complete three-dimensional optical digitization.
[2] P. Zhang, K. Zhong, L. Zhongwei et al. High dynamic range 3D measurement based on structured light: a review.
[3] B. Salahieh, Z. Chen, J.J. Rodriguez et al. Multi-polarization fringe projection imaging for high dynamic range objects.
[4] V. Suresh, Y. Wang, B. Li. High-dynamic-range 3D shape measurement utilizing the transitioning state of digital micromirror device.
[5] S. Zhang, S.-T. Yau. High dynamic range scanning technique [J].
[6] Y. Liu, Y. Fu, X. Cai et al. A novel high dynamic range 3D measurement method based on adaptive fringe projection technique.
[7] Y. Liu, Y. Fu, Y. Zhuan et al. High dynamic range real-time 3D measurement based on Fourier transform profilometry.
[8] S. Feng, Y. Zhang, Q. Chen et al. General solution for high dynamic range three dimensional shape measurement using the fringe projection technique.
[9] H. Jiang, H. Zhao, X. Li. High dynamic range fringe acquisition: a novel 3-D scanning technique for high-reflective surfaces.
[10] S. Zhang. Rapid and automatic optimal exposure control for digital fringe projection technique.
[11] C. Zhang, J. Xu, N. Xi et al. A robust surface coding method for optically challenging objects using structured light.
[12] C. Waddington, J. Kofman. Analysis of measurement sensitivity to illuminance and fringe-pattern gray levels for fringe-pattern projection adaptive to ambient lighting.
[13] D. Li, J. Kofman. Adaptive fringe-pattern projection for image saturation avoidance in 3D surface-shape measurement.
[14] Z. Qi, Z. Wang, J. Huang et al. Highlight removal based on the regional-projection fringe projection method.
[15] H. Lin, J. Gao, Q. Mei et al. Adaptive digital fringe projection technique for high dynamic range three-dimensional shape measurement.
[16] C. Chen, N. Gao, X. Wang et al. Adaptive projection intensity adjustment for avoiding saturation in three-dimensional shape measurement.
[17] C. Chen, N. Gao, X. Wang et al. Adaptive pixel-to-pixel projection intensity adjustment for measuring a shiny surface using orthogonal color fringe pattern projection.
[18] B. Wei, F. Yanjun, Z. Kejun et al. Rapid 3D measurement of colour objects based on three-channel sinusoidal fringe projection.
[19] Z. Zhang, C.E. Towers, D.P. Towers. Time efficient color fringe projection system for 3D shape and color using optimum 3-frequency selection.
[20] Q. Zhu, H. Zhao, C. Zhang et al. Point-to-point coupling and imbalance correction in color fringe projection profilometry based on multi-confusion matrix.
[21] K. Sakashita, Y. Yagi, R. Sagawa et al. A system for capturing textured 3D shapes based on one-shot grid pattern with multi-band camera and infrared projector, 49-56(2011).
[22] H. Lin, J. Gao, Q. Mei et al. Three-dimensional shape measurement technique for shiny surfaces by adaptive pixel-wise projection intensity adjustment.
[23] G. Babaie, M. Abolbashari, F. Farahi. Dynamics range enhancement in digital fringe projection technique.
[24] H. Lin, J. Gao, Q. Mei et al. Adaptive digital fringe projection technique for high dynamic range three-dimensional shape measurement.
[25] C. Zuo, T. Tao, S. Feng et al. Micro Fourier transform profilometry (μFTP): 3D shape measurement at 10,000 frames per second.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20