
Chao Qin, Yafei Wang, Yuchao Zhang, Chengliang Yin. 3D Object Detection Based on Extremely Sparse Laser Point Cloud and RGB Images[J]. Laser & Optoelectronics Progress, 2022, 59(18): 1828004
- Laser & Optoelectronics Progress
- Vol. 59, Issue 18, 1828004 (2022)
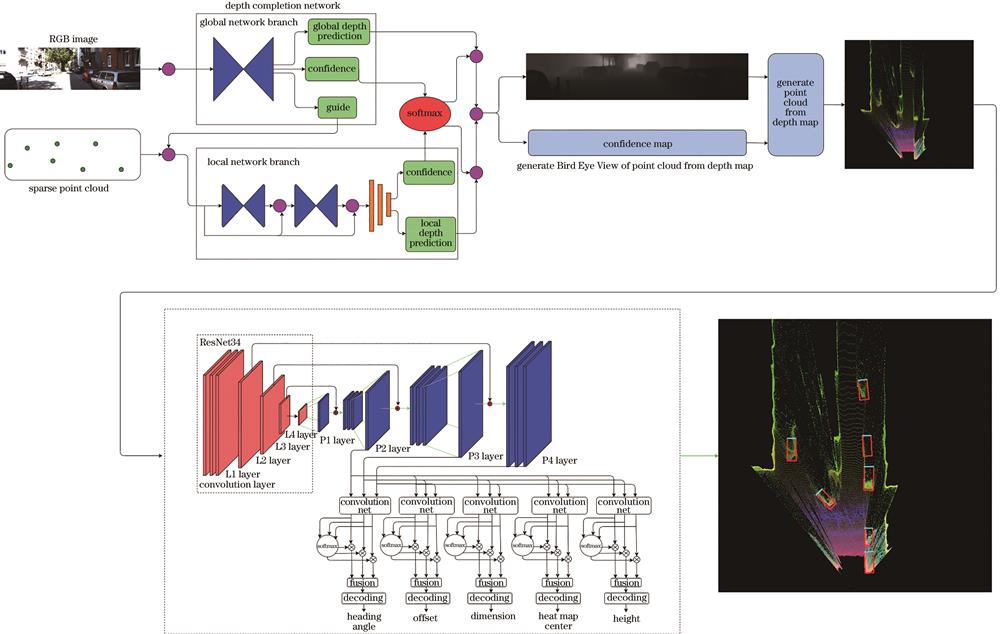
Fig. 1. Structure of proposed 3D object detection algorithm
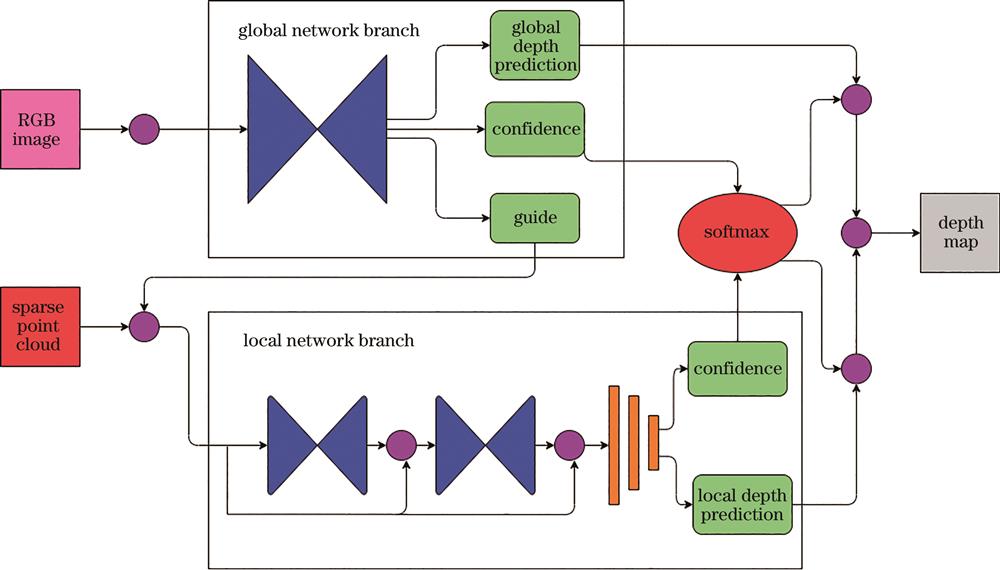
Fig. 2. Depth completion network
Fig. 3. Results of dense point cloud and sparse point cloud projected on the image respectively
Fig. 4. Point cloud image generated from depth map
Fig. 5. 3D object detection network based on key point feature pyramid
Fig. 6. Dense depth map generated from depth completion network
Fig. 7. Result of sparse point cloud projection on the image
Fig. 8. Dense depth map generated from depth completion network
Fig. 9. BEV map generated from dense point cloud after aerial view projection
Fig. 10. Detection result on BEV map
Fig. 11. Display effect of object detection stereo bounding box on camera RGB pictures
| |||||||||||||||||||||||||||||
Table 1. Target detection accuracy of proposed algorithm on KITTI dataset
| |||||||||||||||||||||||||||||||||||||||
Table 2. Target detection accuracy under the condition of sparse point cloud BEV as theinput of key point feature pyramid network
| |||||||||||||||||||||||||||||||||||||||
Table 3. Target detection accuracy under the condition of coded point cloud in previous view form
| |||||||||||||||||||||||||||||||||||||||
Table 4. Target detection accuracy under the condition of only taking the picture as the input of depth complement network
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 5. Target detection accuracy under different point cloud down sampling rates
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 6. Comparison of 3D object detection algorithms on KITTI dataset
|
Table 7. Running time comparison of 3D object detection algorithms on KITTI dataset

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20