Author Affiliations
College of Automation, Harbin Engineering University, Harbin, Heilongjiang 150001, Chinashow less
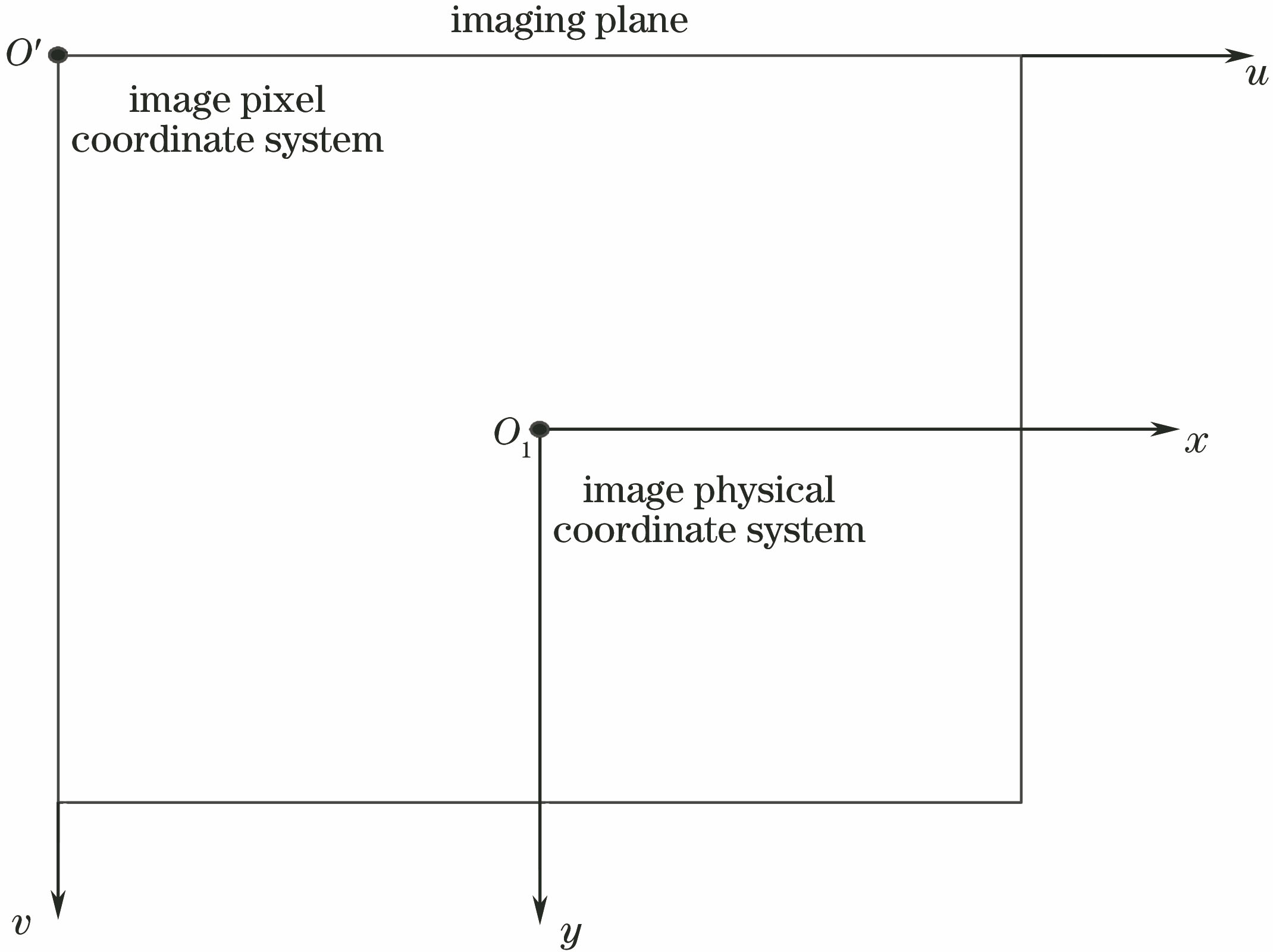
Fig. 1. Image pixel coordinate system
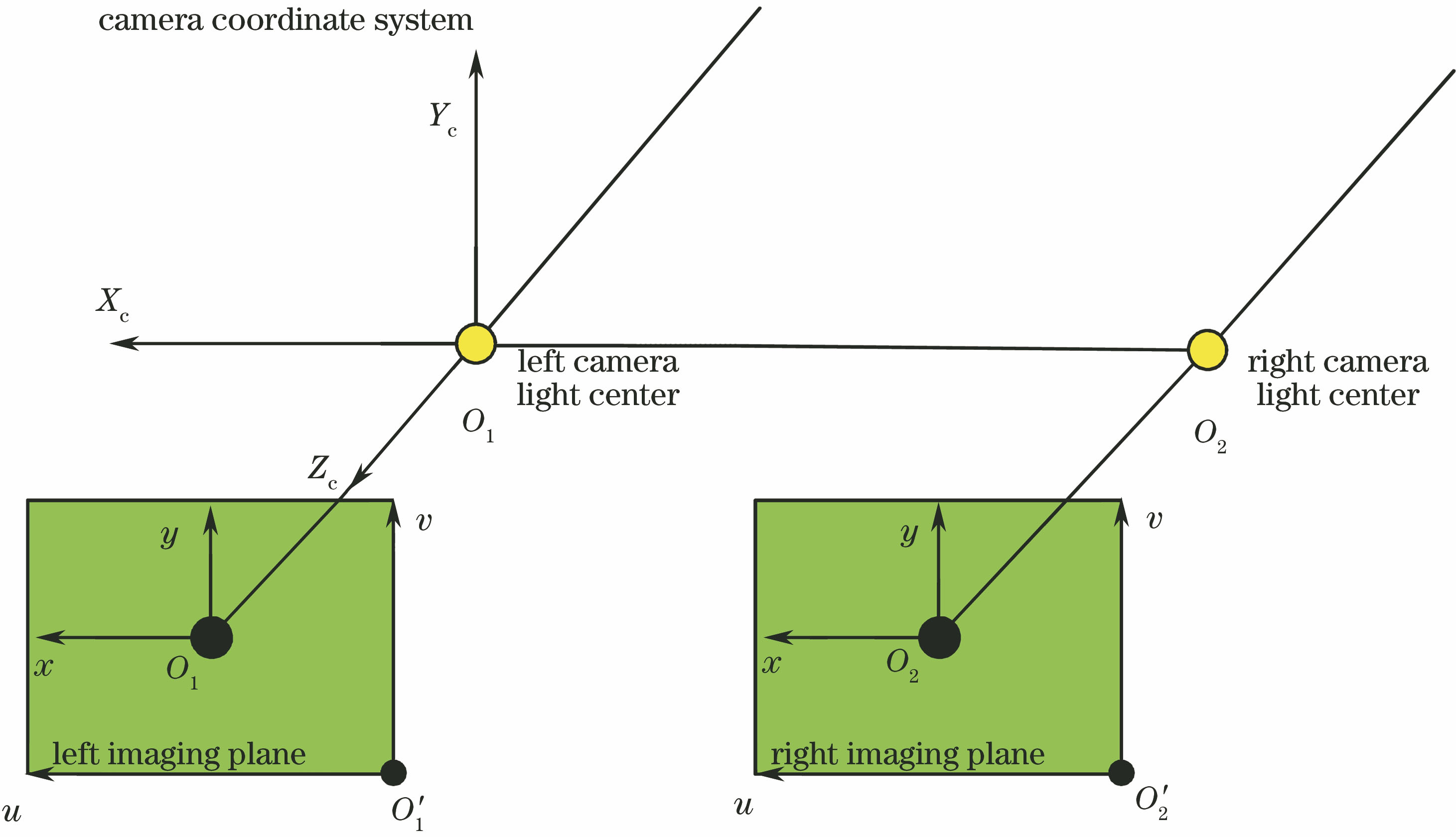
Fig. 2. Establishment of camera coordinate system
Fig. 3. Camera pinhole model
Fig. 4. Binocular ranging model
Fig. 5. Schematic of measurement
Fig. 6. Schematic of imaging point mapping line
Fig. 7. Undistort image. (a) Before processing; (b) after processing
Fig. 8. Target point coordinate measurement
Fig. 9. Results of feature point matching
Fig. 10. Results of feature point matching in ROI
Fig. 11. Comparison of measured trajectory and actual trajectory
| No. | Left eye pixelcoordinate /pixel | Right eye pixelcoordinate /pixel | Actualcoordinate /mm | Actualrange /mm |
|---|
| 1 | 840,918 | 719,902 | [0,-540,-4500] | 4532.3 | | 2 | 840,920 | 701,904 | [0,-540,-4000] | 4036.3 | | 3 | 840,927 | 683,911 | [0,-540,-3500] | 3541.4 | | 4 | 840,937 | 656,920 | [0,-540,-3000] | 3048.2 | | 5 | 840,948 | 619,932 | [0,-540,-2500] | 2557.7 | | 6 | 840,967 | 560,950 | [0,-540,-2000] | 2071.6 | | 7 | 840,999 | 476,978 | [0,-540,-1500] | 1594.2 | | 8 | 840,1062 | 316,1020 | [0,-540,-1000] | 1136.5 |
|
Table 1. Actual distance and coordinates of the target
| No. | Coordinate measurementresult /mm | Measuringdistance /mm | Actualdistance /mm | Error /mm | Errorrate /% |
|---|
| 1 | [-252.81,-499.91,-4253.07] | 4289.81 | 4532.3 | 242.49 | 5.35 | | 2 | [-111.24,-528.55,-1871.40] | 1947.78 | 4036.3 | 2084.52 | 51.74 | | 3 | [-194.125,-511.78,-3265.80] | 3311.36 | 3541.4 | 230.04 | 6.50 | | 4 | [-182.112,-514.21,-3063.71] | 3111.89 | 3048.2 | 63.69 | 8.64 | | 5 | [-151.99,-520.30,-2557.06] | 2613.88 | 2557.7 | 56.18 | 2.20 | | 6 | [-66.57,-537.59,-1119.89] | 1244.02 | 2071.6 | 827.58 | 39.94 | | 7 | [-78.92,-535.09,-1327.63] | 1453.58 | 1594.2 | 140.62 | 10.08 | | 8 | [-58.98,-539.12,-992.22] | 1130.76 | 1136.5 | 5.74 | 0.51 |
|
Table 2. Data of measurement
| No. | Coordinate measurementresult /mm | Measuringdistance /mm | Actualdistance /mm | Error /mm | Errorrate /% |
|---|
| 1 | [-268.28,-523.94,-4513.39] | 4551.62 | 4532.3 | 19.32 | 0.43 | | 2 | [-244.29,-501.60,-4109.87] | 4147.57 | 4036.3 | 111.27 | 2.76 | | 3 | [-212.33,-509.78,-3572.13] | 3614.57 | 3541.4 | 73.17 | 2.01 | | 4 | [-178.71,-513.37,-3006.45] | 3055.20 | 3048.2 | 7.00 | 0.23 | | 5 | [-149.78,-516.23,-2519.79] | 2576.48 | 2557.7 | 18.78 | 0.73 | | 6 | [-118.18,-516.18,-1988.22] | 2057.53 | 2071.6 | 14.07 | 0.68 | | 7 | [-89.11,-521.96,-1499.08] | 1589.90 | 1594.2 | 4.30 | 0.27 | | 8 | [-60.48,-509.82,-1017.45] | 1140.21 | 1136.5 | 3.71 | 0.33 |
|
Table 3. Comparison of corrected target ranging
| No. | Coordinate measurementresult /mm | Measuringdistance /mm | Actualdistance /mm | Error /mm | Errorrate /% |
|---|
| 1 | [227.47,-495.67,-4532.36] | 4565.05 | 4532.3 | 32.75 | 0.72 | | 2 | [203.84,-510.46,-4061.47] | 4098.49 | 4036.3 | 62.19 | 1.54 | | 3 | [180.41,-530.01,-3594.63] | 3637.97 | 3541.4 | 96.57 | 2.73 | | 4 | [153.88,-535.47,-3066.01] | 3116.22 | 3048.2 | 68.02 | 2.23 | | 5 | [128.65,-531.36,-2563.38] | 2621.03 | 2557.7 | 63.33 | 2.48 | | 6 | [80.87,-549.62,-2057.45] | 2131.13 | 2071.6 | 59.53 | 2.87 | | 7 | [78.48,-562.33,-1563.66] | 1663.55 | 1594.2 | 69.35 | 4.35 | | 8 | [76.53,-585.08,-1063.72] | 1216.42 | 1136.5 | 79.92 | 7.03 |
|
Table 4. Results of binocular stereoscopic ranging
| No. | Coordinate measurementresult /mm | Measuringdistance /mm | Actualdistance /mm | Error /mm | Errorrate /% |
|---|
| 1 | [226.23, -496.32,-4531.87] | 4564.58 | 4532.3 | 32.28 | 0.71 | | 2 | [203.62,-509.85 ,-4059.98] | 4096.93 | 4036.3 | 60.63 | 1.50 | | 3 | [160.01 ,-539.91 ,-3553.95] | 3598.29 | 3541.4 | 56.89 | 1.61 | | 4 | [143.47,-535.88 ,-3055.99] | 3105.93 | 3048.2 | 57.73 | 1.89 | | 5 | [128.45,-532.01,-2552.88] | 2610.89 | 2557.7 | 53.19 | 2.08 | | 6 | [80.81,-542.79,-2047.48] | 2119.75 | 2071.6 | 48.15 | 2.32 | | 7 | [72.78,-552.33,-1533.66] | 1631.71 | 1594.2 | 37.51 | 2.35 | | 8 | [67.53,-564.08,-1028.75] | 1175.19 | 1136.5 | 38.69 | 3.39 |
|
Table 5. Results of measurement