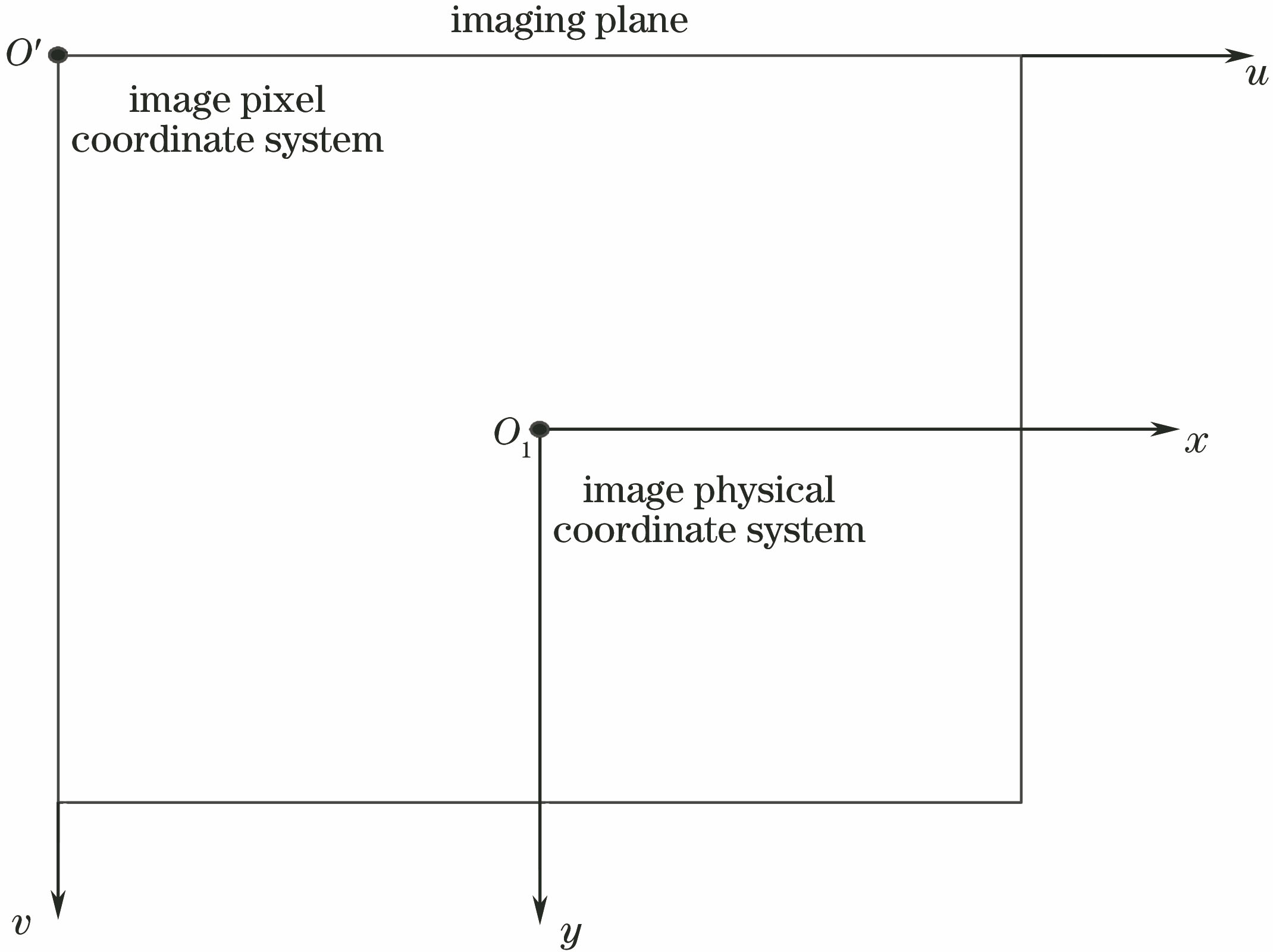
ing at the difficulty of binocular synchronous stereo matching under high-speed camera conditions, a fast measurement algorithm for the spatial linear motion trajectory based on binocular camera is proposed. The camera space coordinate system is established ,and the imaging model is constructed based on the principle of small hole imaging and the mapping relationship between the target point and the corresponding point. The principle of the algorithm is verified experimentally, and the method of reducing the error by traversing the input points and finding the average value of the result is obtained. The feasibility of the principle and the effectiveness of the algorithm are verified.

Chengtao Cai, Feng Wang. Fast Trajectory Measurement Algorithm for Linear Motion Based on Binocular Camera[J]. Laser & Optoelectronics Progress, 2019, 56(5): 051502
