
Cheng Jiang, Patrick Kilcullen, Yingming Lai, Tsuneyuki Ozaki, Jinyang Liang, "High-speed dual-view band-limited illumination profilometry using temporally interlaced acquisition," Photonics Res. 8, 1808 (2020)
- Photonics Research
- Vol. 8, Issue 11, 1808 (2020)
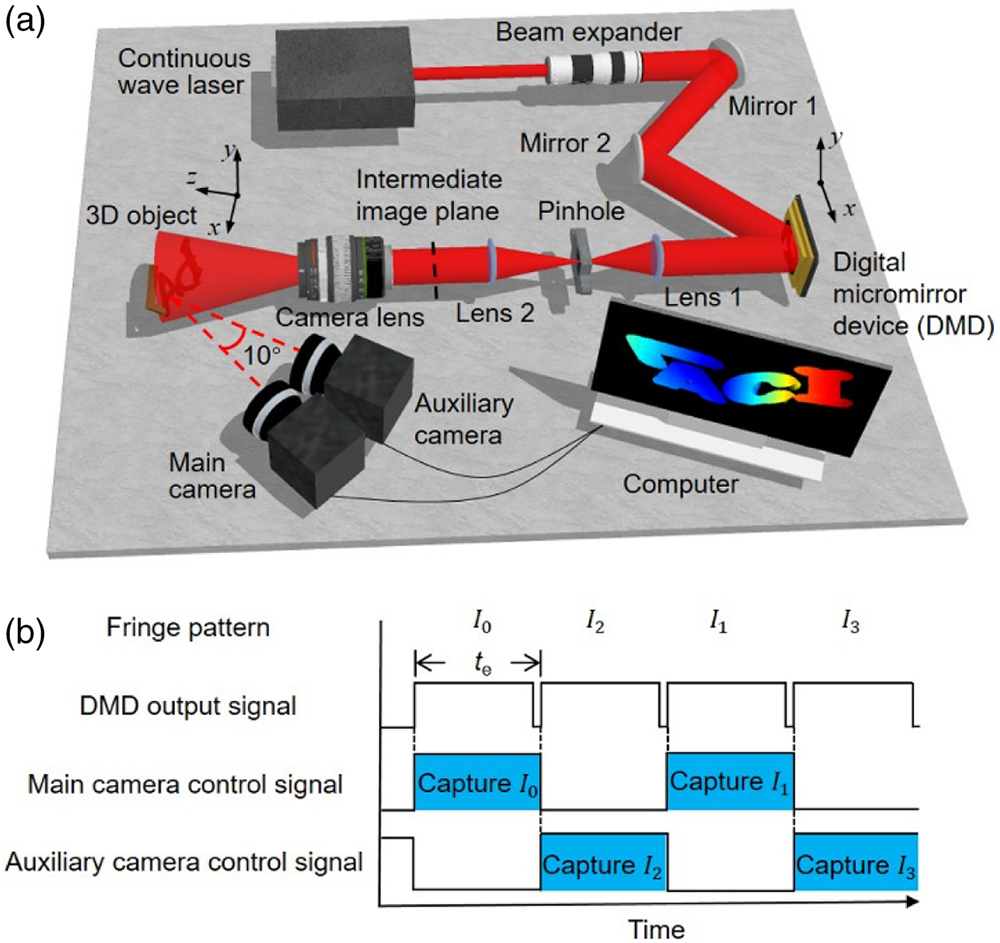
Fig. 1. Operating principle of TIA–BLIP. (a) System schematic. (b) Timing diagram and acquisition sequence. t e
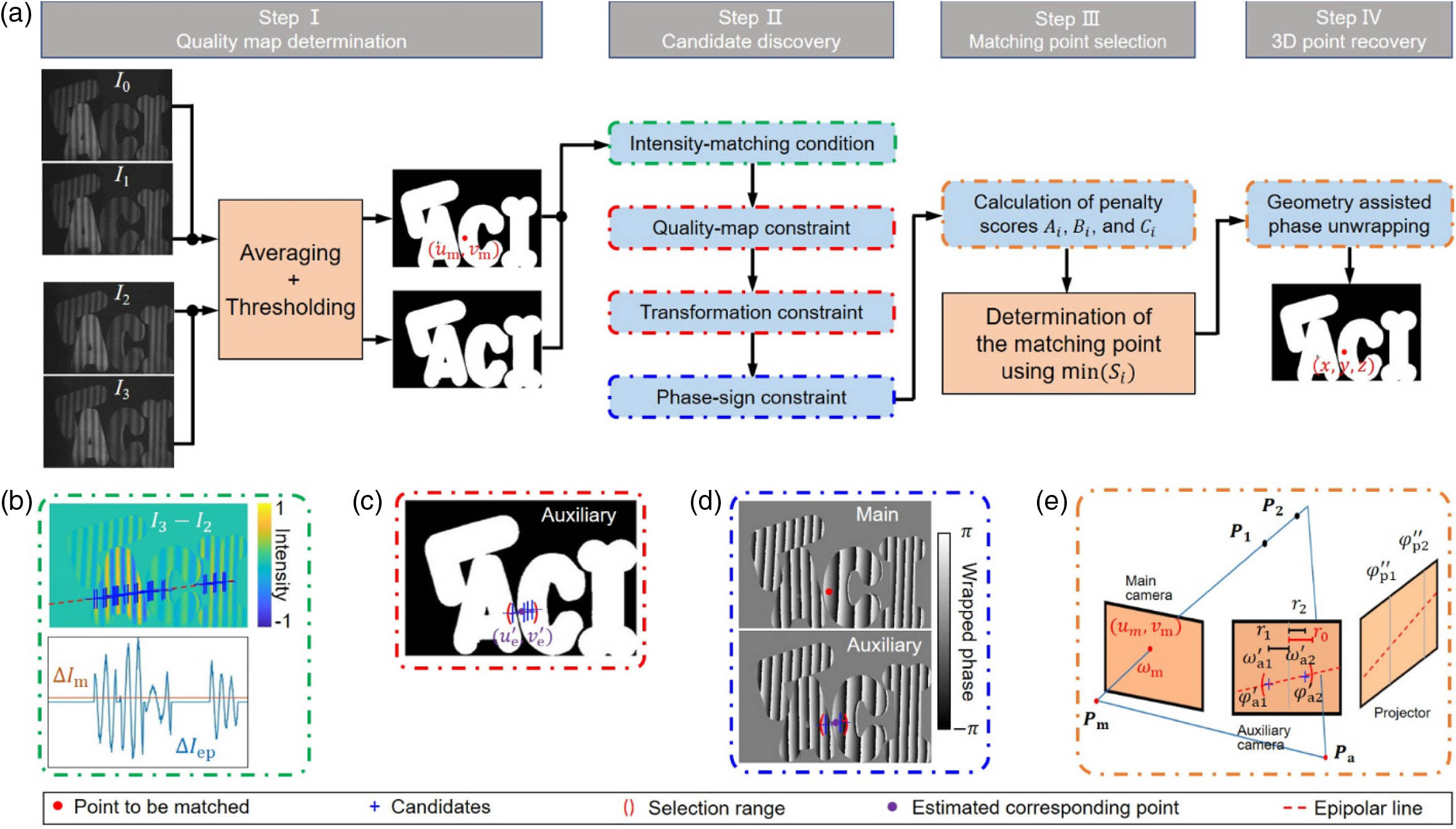
Fig. 2. Coordinate-based 3D point determination algorithm. (a) Flowchart of the algorithm. ( u m , v m ) ( x , y , z ) Δ I m = I 0 ( u m , v m ) − I 1 ( u m , v m ) Δ I ep I 3 − I 2 ( u e ′ , v e ′ ) r i ω m ω a i ′ φ a i ′ φ p i ′ ′ P i P m P a
Fig. 3. Quantification of TIA–BLIP’s depth resolution. (a) 3D images of the planar surfaces (top image) and measured depth difference (bottom plot) at four exposure times. The white boxes represent the selected regions for analysis. (b) Relation between measured depth differences and their corresponding exposure times.
Fig. 4. TIA–BLIP of static 3D objects. (a) Reconstructed results of letter toys. Two perspective views are shown in the top row. Selected depth profiles (marked by the white dashed lines in the top images) and close-up views are shown in the bottom row. (b) Two perspective views of the reconstruction results of three toy cubes.
Fig. 5. TIA–BLIP of dynamic objects. (a) Reconstructed 3D images of a moving hand at five time points. (b) Movement traces of four fingertips [marked in the first panel in (a)]. (c) Front view of the reconstructed 3D image of the bouncing balls at five different time points. (d) Evolution of 3D positions of the three balls [marked in the third panel in (c)].
Fig. 6. TIA–BLIP of sound-induced vibration on glass. (a) Schematic of the experimental setup. The field of view is marked by the red dashed box. (b) Four reconstructed 3D images of the cup driven by a 500-Hz sound signal. (c) Evolution of the depth change of five points marked in the first panel of (b) with the fitted result. (d) Evolution of the averaged depth change with the fitted results under the driving frequencies of 490 Hz, 500 Hz, and 510 Hz. Error bar: standard deviation of Δ z
Fig. 7. TIA–BLIP of glass breakage. (a) Six reconstructed 3D images showing a glass cup broken by a hammer. (b) Evolution of 3D velocities of four selected fragments marked in the fourth and fifth panels in (a). (c) Evolution of the corresponding 3D accelerations of the four selected fragments.


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20