
Tao Xiong, Shuanggao Li, Qi Li, Ziyue Zhao. Station Planning of Laser Tracker Based on Combination Measurement[J]. Laser & Optoelectronics Progress, 2021, 58(17): 1712001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 17, 1712001 (2021)
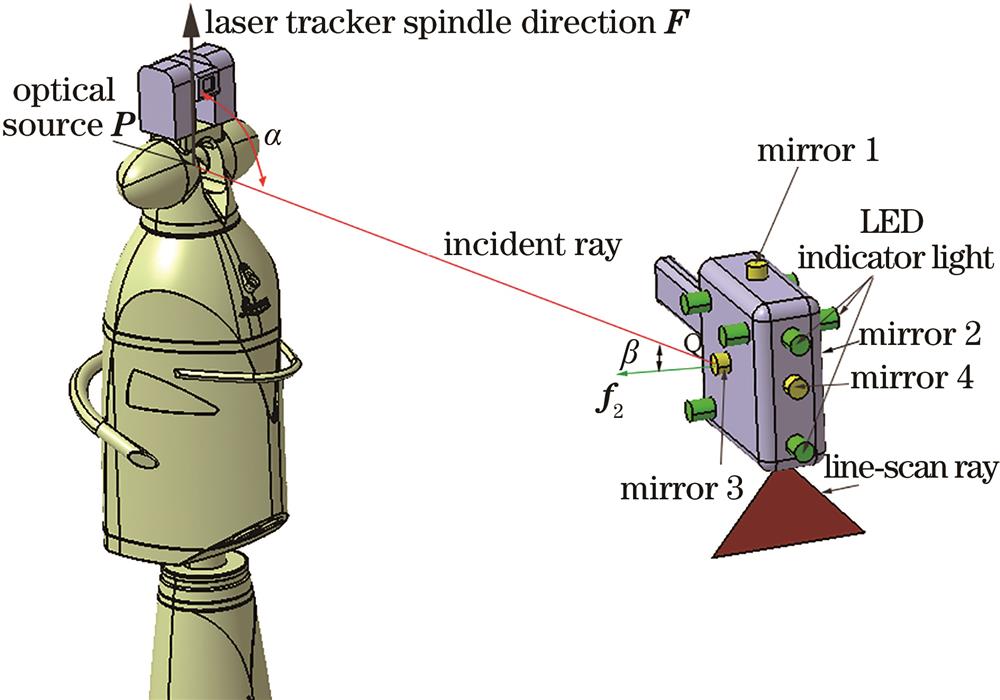
Fig. 1. Combination measurement constraint model
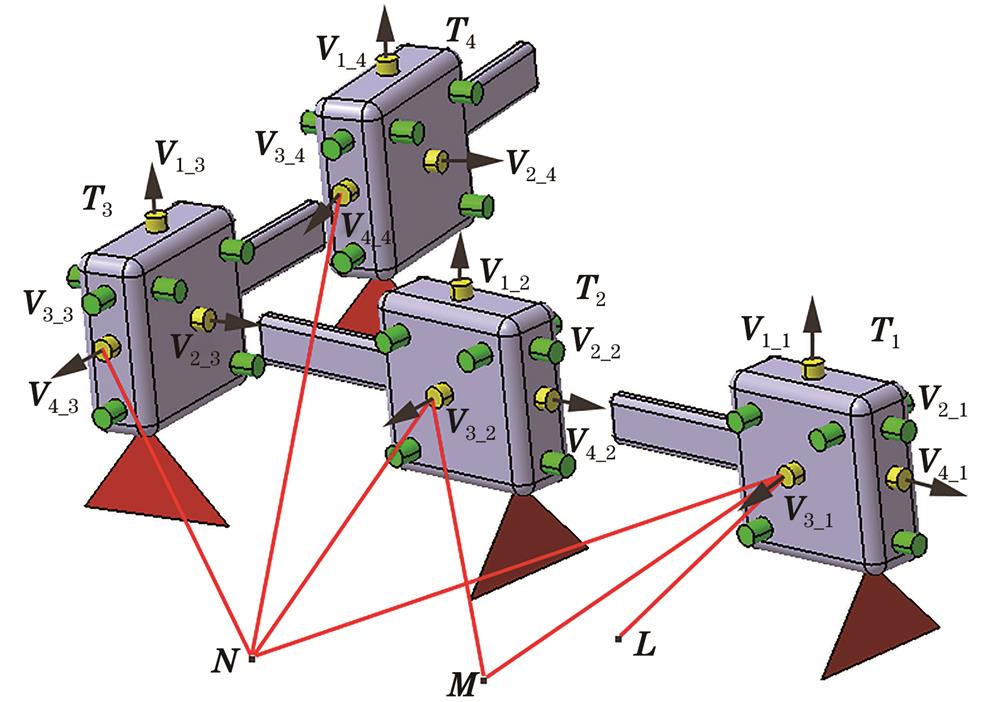
Fig. 2. Idea of station planning and mirror replacement
Fig. 3. Flow of station planning method
Fig. 4. Experiment device and platform
Fig. 5. Simulation software interface and display window
Fig. 6. Scanning path
Fig. 7. Station setting by the empirical method. (a) The 28th T-Scan pose; (b) the 45th T-Scan pose; (c) the 73rd T-Scan pose
Fig. 8. Simulated picture and actual measurement picture of the 3rd planning result. (a) Simulated picture;(b) actual measurement picture
Fig. 9. Simulated picture and actual measurement picture of the 4th planning result. (a) Simulated picture; (b) actual measurement picture
|
Table 1. Scanning path pose points and mirror poses
|
Table 2. Station results by empirical method
|
Table 3. The 3rd planning result
|
Table 4. The 4th planning result

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20