
Hong Xiao, Chuan Tian, Yi Zhang, Bo Wei, Jiaqi Kang. Stereo Matching Algorithm Based on Improved Census Transform and Gradient Fusion[J]. Laser & Optoelectronics Progress, 2021, 58(2): 0215008
- Laser & Optoelectronics Progress
- Vol. 58, Issue 2, 0215008 (2021)
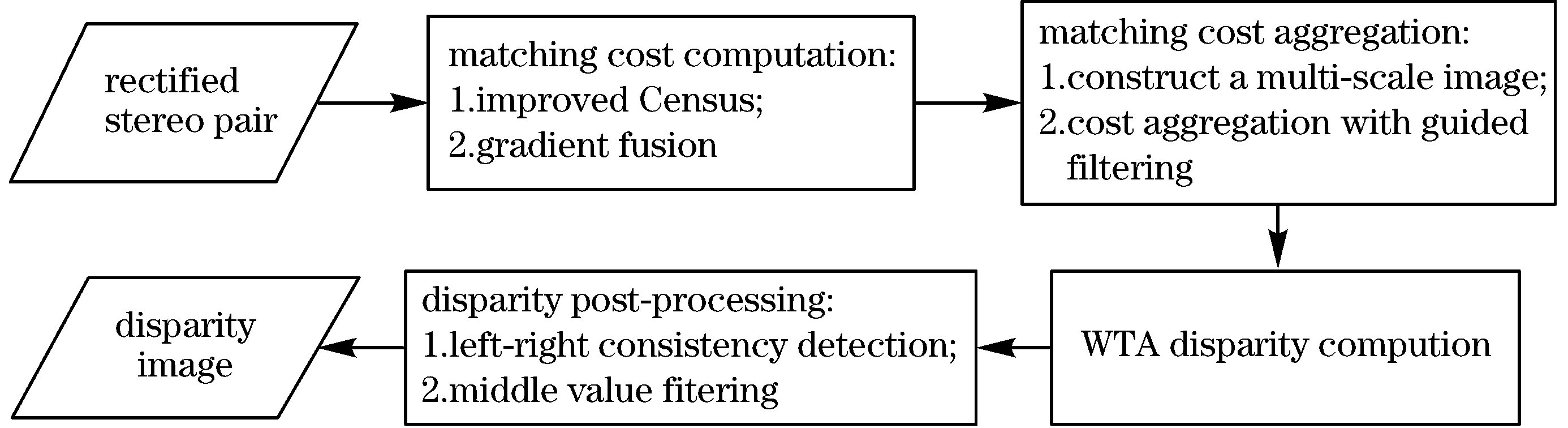
Fig. 1. Flow chart of our algorithm
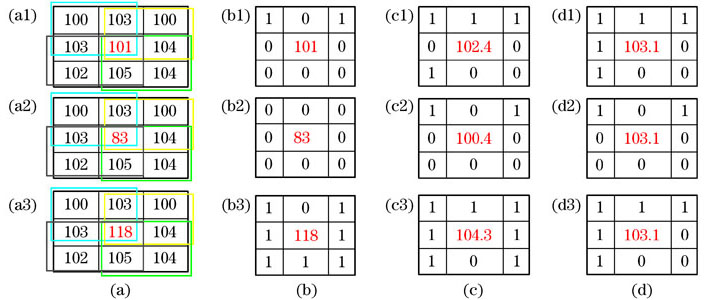
Fig. 2. Census transform windows obtained by different algorithms. (a) Different windows; (b) center pixel value; (c) average value of window pixels; (d) our algorithm
Fig. 3. Disparity images obtained by different algorithms. (a) Left image; (b) right image; (c) true disparity image; (d) CT; (e) impro-CT; (f) GRD; (g) our algorithm
Fig. 4. Aloe disparity images obtained by our algorithm. (a) Left image; (b) right image; (c) real disparity image; (d) disparity image in multi-scale space; (e) final disparity image
Fig. 5. Disparity images obtained by different algorithms under different conditions. (a) Left image; (b) right image; (c) ground truth; (d) CT; (e) Impro-CT; (f) GRD; (g) our algorithm
Fig. 6. Disparity images of the actual scene. (a) Left image; (b) right image; (c) disparity images generated by our algorithm
|
Table 1. Parameter of our algorithm
|
Table 2. Mismatch rates of different cost algorithms (non-occluded area) unit: %
|
Table 3. Mismatch rates of different cost algorithms (occlusion area) unit: %

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20