
Miao Tian, Banglei Guan, Fang Sun, Yun Yuan, Qifeng Yu. Decoupling Relative Pose Estimation Method for Non-Overlapping Multi-Camera System[J]. Acta Optica Sinica, 2021, 41(5): 0515001
- Acta Optica Sinica
- Vol. 41, Issue 5, 0515001 (2021)
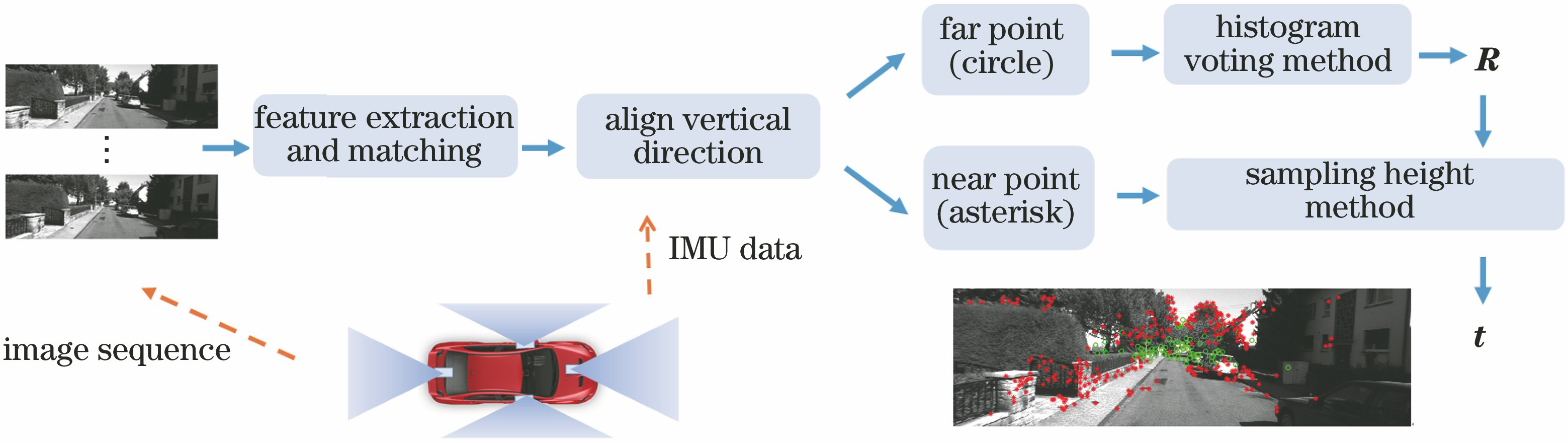
Fig. 1. Processing flow of proposed method
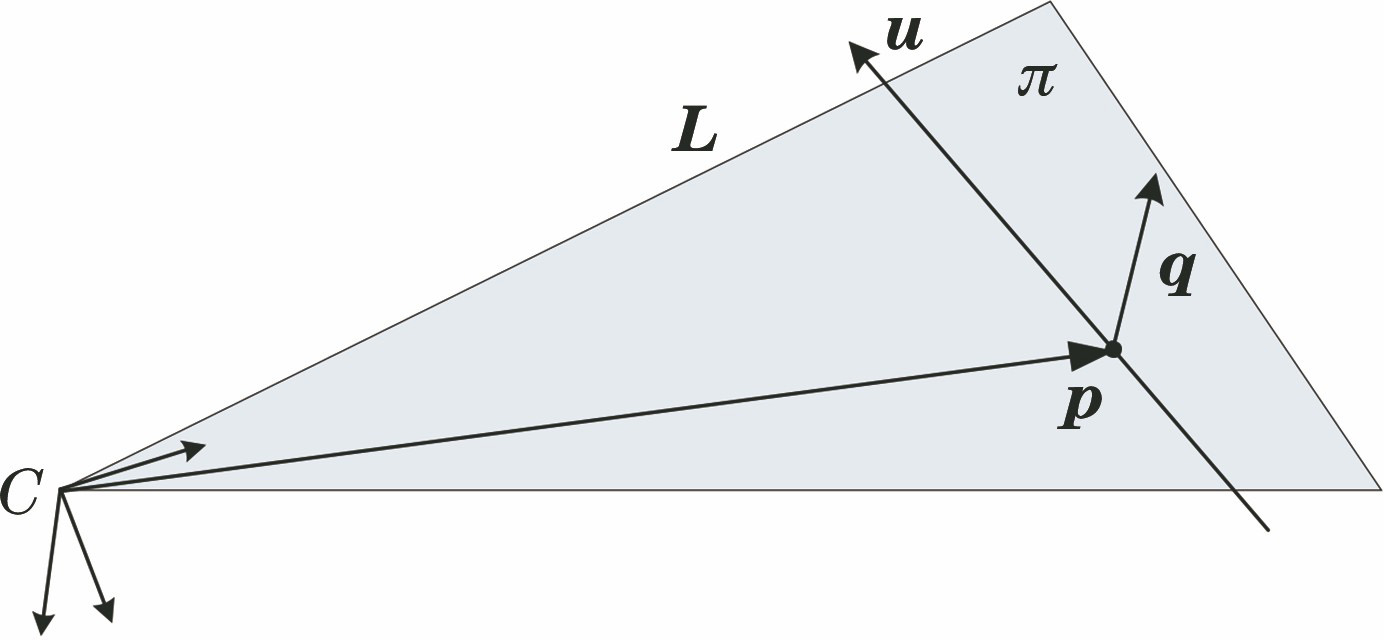
Fig. 2. Plücker coordinates of line in 3D Euclidean space
Fig. 3. Generalized camera polar geometric constraints
Fig. 4. Error of relative pose under different motion condition after adding noise. (a)(b) Forward motion; (c)(d) random motion; (e)(f) sideways motion
Fig. 5. Schematic of translation vector simulating image coordinate change
Fig. 6. Distinguishing effects of different images. (a) 2021th frame of left camera; (b) 2021th frame of right camera; (c) 2022th frame of left camera; (d) 2022th frame of right camera
Fig. 7. Error distribution curves of pose estimation. (a) Rotation matrix error; (b) translation vector error
|
Table 1. Running time of different relative pose estimation methods
|
Table 2. Accuracy of pose estimation

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20