Objective In the aircraft manufacturing field, compared with the traditional riveting method, the lightweight technology of laser welding can improve the workpiece stiffness and work efficiency. To improve the welding quality of T-joints on structural components of aircraft, the dual-beam laser welding equipment based on beam structure is used to weld the bilateral welding seam of T-joint simultaneously, enabling precise control of the position and posture of the welding head, stable welding speed and impact, high welding efficiency, and superior laser welding quality. Since the T-joint of the fuselage belongs to the aerospace field, the welding process requirements are higher than that of the general welding object, and further data extraction of the welding seam is required. While there have been many studies on trajectory planning of a typical single manipulator in the industrial welding robot, there is little literature on trajectory planning of multiple manipulators. The single manipulator is already a high-order, nonlinear, and strongly coupled multiple input multiple output system, and trajectory planning for a welding robot with multiple manipulators is complex. In this study, trajectory optimization of a novel dual-beam laser welding robot with multiple manipulators is investigated to obtain a smooth and efficient movement of the robot while meeting the position, velocity, and acceleration requirements of each joint.
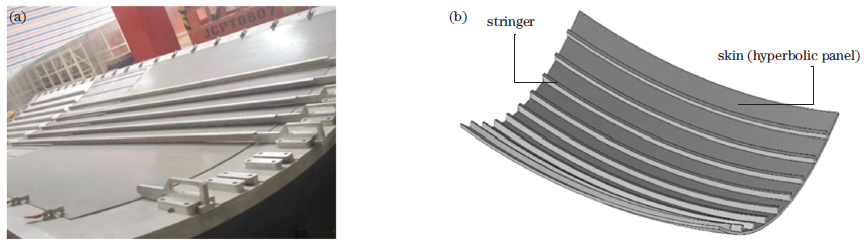
Methods Using coordinate transformation and quintic B-spline curve, the robot end effector representation and joint space trajectory interpolation propagate the dual-beam laser through bilateral welding seam of T-joint successively, which contributes significantly to the cooperative motion of robot multiple manipulators. First, the geometric features of the T-joint on the hyperbolic panel are obtained, followed by the extraction of the welding trajectory's key path points. According to the path-point transformation matrix of the local coordinate system relative to the base coordinate system, the position and attitude of three robot manipulators are obtained. Second, the displacement or rotation angle of each robot joint is calculated on the basis of the inverse kinematics solution of the dual-beam laser welding robot. Third, the displacement or rotation angle of 18 joints is interpolated by a quintic B-spline curve to obtain the continuous joint space trajectory. Fourth, the velocity and acceleration of each joint are taken as the optimization constraints, and the efficient and stable movements of the dual-beam laser welding robot are taken as the objectives to establish a trajectory optimization model of the cooperative robot with multiple manipulators. Finally, the non-dominated sorting genetic algorithm Ⅲ (NSGAⅢ) and non-dominated sorting genetic algorithm Ⅱ (NSGAⅡ) are used to solve the optimization model.
Results and Discussions (1) The position and attitude of three robot manipulators' end effectors (Tables 1--3) are obtained as the basis for establishing the trajectory optimization model. (2) The Pareto set of the optimal time interval sequence for each joint of the robot (Figure 8) is obtained by NSGAⅢ, and the proposed multi-objective optimization model can provide abundant candidate schemes for the users of the dual-beam laser welding robot. According to the actual welding process requirements, the corresponding optimization time interval under a set of target vector values (Table 4) can be selected. However, the Pareto set obtained by NSGAⅡ (Figure 9) is more sparse and less uniform than the Pareto set distribution, which makes it difficult to select solutions for robot users to cope with varying welding requirements. (3) According to the speed of the three robot manipulators' end effectors before and after the application of the two optimization algorithms (Tables 5--7), the speed of the three manipulators' end effectors is very close at each time point, and when the speed of one manipulator increases or decreases, the speed of the other two manipulators also increases or decreases correspondingly with the same change trend, indicating that the dual-beam laser welding robot can not only complete the bilateral welding seam of T-joint in geometric space but also has a certain cooperative stability. (4) Speed comparison of the dual-beam laser welding robot's middle manipulator's end effector before and after optimization (Figure 10) shows that the fluctuation range of the end velocity of the robot is reduced, and its stability is improved significantly after optimization. In the startup phase, the speed of the middle manipulator optimized by NSGAⅢ is less than that of the middle manipulator optimized by NSGAⅡ. In the stop phase, the speed of the middle manipulator optimized by NSGAⅡ is slightly less than that of the middle arm optimized by NSGAⅢ. In the startup and stop phases, the impact and vibration of the robot can be reduced because of the low speed. (5) The results (Table 8) show that NSGAⅢ only takes 3.8‰ more computational time than NSGAⅡ to solve the problem, and the diversity of Pareto solution set is improved by 161.29‰.
Conclusions In this study, we consider the trajectory optimization problem of a dual-beam laser welding robot, which has not been previously considered in the literature. Aiming at the welding of large-scale structural components in aviation, a general solution method for the position and attitude of the end effectors of a dual-beam laser welding robot is proposed, which ensures the cooperative welding operation of multiple joints of the dual-beam laser welding robot. The trajectory optimization model is proposed to further improve the welding quality of T-joints. The motion stability and operation time of the dual-beam laser welding robot are optimized on the basis of the position, velocity, and acceleration requirements of each joint. NSGAⅡ and NSGAⅢ are used to solve the multi-objective optimization model, and comparative analyses are performed.