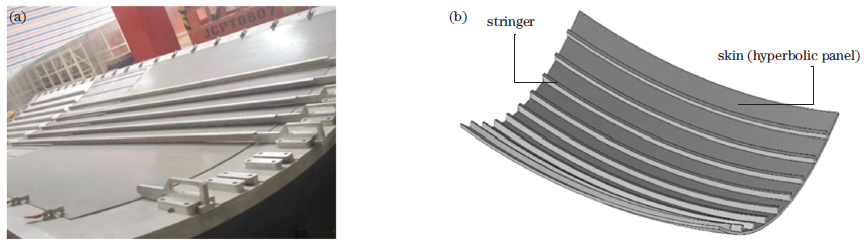
Fig. 1. Welding skin and stringer. (a) Part;(b) three-dimensional model
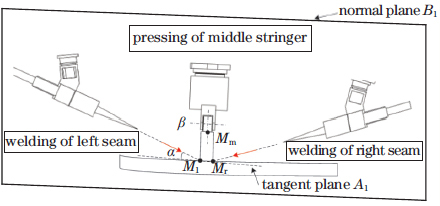
Fig. 2. Welding dual seam of T-joint
Fig. 3. Dual-beam laser welding robot system
Fig. 4. Planning level of robot multi-arm cooperative welding
Fig. 5. Schematic of correlation vector of critical path points
Fig. 6. Schematic of coordinate system transformation
Fig. 7. Multi objective optimization trajectory flow chart based on NSGAⅢ
Fig. 8. Pareto set
Fig. 9. Pareto set based on NSGAⅡ
Fig. 10. Speed comparison of laser welding robot middle manipulator end effector before and after optimization
| i | n(xi,1) | n(yi,1) | n(zi,1) | o(xi,1) | o(yi,1) | o(zi,1) | a(xi,1) | a(yi,1) | a(zi,1) | xi,1 | yi,1 | zi,1 |
|---|
| 1 | 0.98059 | 0.00037 | 0.19606 | 0.03099 | 0.98714 | -0.15686 | -0.19360 | 0.15989 | 0.96797 | -1494.55 | 2411.74 | 1658.92 | | 2 | 0.98206 | 0.00036 | 0.18859 | 0.02980 | 0.98714 | -0.15709 | -0.18622 | 0.15989 | 0.96941 | -1571.61 | 2411.71 | 1643.38 | | … | … | … | … | … | … | … | … | … | … | … | … | … | | 50 | 0.98206 | -0.00036 | -0.18859 | -0.02980 | 0.98714 | -0.15709 | 0.18622 | 0.15989 | 0.96941 | -5318.40 | 2411.67 | 1622.26 | | 51 | 0.98059 | -0.00037 | -0.19606 | -0.03099 | 0.98714 | -0.15686 | 0.19360 | 0.15989 | 0.96797 | -5395.62 | 2411.69 | 1636.96 |
|
Table 1. Position and attitude of the pressing end effector
| i | n(xi,2) | n(yi,2) | n(zi,2) | o(xi,2) | o(yi,2) | o(zi,2) | a(xi,2) | a(yi,2) | a(zi,2) | xi,2 | yi,2 | zi,2 |
|---|
| 1 | -0.00978 | -0.99872 | 0.04973 | 0.98120 | 0 | 0.19298 | -0.19273 | 0.05068 | 0.97994 | -1562.50 | 2075.97 | 1672.12 | | 2 | -0.00941 | -0.99872 | 0.04980 | 0.98262 | 0 | 0.18561 | -0.18537 | 0.05068 | 0.98136 | -1639.23 | 2075.97 | 1657.33 | | … | … | … | … | … | … | … | … | … | … | … | … | … | | 50 | 0.00941 | -0.99872 | 0.04980 | 0.98262 | 0 | -0.18561 | 0.18537 | 0.05068 | 0.98136 | -5360.80 | 2075.97 | 1657.34 | | 51 | 0.00978 | -0.99872 | 0.04973 | 0.98120 | 0 | -0.19298 | 0.19273 | 0.05068 | 0.97994 | -5437.50 | 2075.97 | 1672.12 |
|
Table 2. Position and attitude of the left welding seam end effector
| i | n(xi,3) | n(yi,3) | n(zi,3) | o(xi,3) | o(yi,3) | o(zi,3) | a(xi,3) | a(yi,3) | a(zi,3) | xi,3 | yi,3 | zi,3 |
|---|
| 1 | 0.05152 | 0.96367 | -0.26210 | -0.98122 | 0 | -0.19287 | -0.18586 | 0.26712 | 0.94557 | -1543.02 | 2738.61 | 1566.84 | | 2 | 0.04955 | 0.96367 | -0.26248 | -0.98265 | 0 | -0.18549 | -0.17875 | 0.26712 | 0.94694 | -1620.60 | 2738.61 | 1551.89 | | … | … | … | … | … | … | … | … | … | … | … | … | … | | 50 | -0.04955 | 0.96367 | -0.26248 | -0.98265 | 0 | 0.18549 | 0.17875 | 0.26712 | 0.94694 | -5379.47 | 2738.61 | 1551.90 | | 51 | -0.05152 | 0.96367 | -0.26210 | -0.98123 | 0 | 0.19287 | 0.18586 | 0.26712 | 0.94557 | -5456.98 | 2738.61 | 1566.84 |
|
Table 3. Position and attitude of the right welding seam end effector
| Number | T1 /s | T2 /s2 |
|---|
| 1 | 36.9373 | 0.0030 | | 2 | 36.9408 | 0.0029 | | … | … | … | | 35 | 38.3977 | 0.0007 | | 36 | 38.4007 | 0.0007 |
|
Table 4. Objective vector value of optimal solution
| Time /s | Speed of middle manipulator end effector /(m·min-1) | Speed of left manipulator end effector /(m·min-1) | Speed of right manipulator end effector /(m·min-1) |
|---|
| 0 | 13.2349 | 13.1656 | 13.3134 | | 0.7400 | 5.1524 | 5.1225 | 5.1773 | | … | … | … | … | | 36.2604 | 10.0846 | 10.0224 | 10.1262 | | 37.0004 | 4.8569 | 4.83551 | 4.8899 |
|
Table 5. Speed of robot end effectors before optimization
| Time/s | Speed of middle manipulator end effector /(m·min-1) | Speed of left manipulator end effector /(m·min-1) | Speed of right manipulator end effector /(m·min-1) |
|---|
| 0 | 8.0633 | 8.1146 | 8.02307 | | 0.7410 | 6.0739 | 6.1039 | 6.0391 | | … | … | … | … | | 36.3080 | 7.6285 | 7.6617 | 7.5822 | | 37.0490 | 4.5236 | 4.5523 | 4.5025 |
|
Table 6. Speed of robot end effectors optimized by NSGAⅡ
| Time /s | Speed of middle manipulator end effector /(m·min-1) | Speed of left manipulator end effector /(m·min-1) | Speed of right manipulator end effector /(m·min-1) |
|---|
| 0 | 7.0282 | 6.9943 | 7.0747 | | 0.7400 | 6.3966 | 6.3594 | 6.4274 | | … | … | … | … | | 36.2604 | 7.3131 | 7.26887 | 7.3455 | | 37.0004 | 3.2036 | 3.19046 | 3.2259 |
|
Table 7. Speed of robot end effectors optimized by NSGAⅢ
| Algorithm | Computing time /s | Number of non-inferior solutions |
|---|
| NSGAⅢ | 6802.74 | 36 | | NSGAⅡ | 6777.07 | 31 |
|
Table 8. Comparison of two algorithms