
Changhua Li, Hao Shi, Zhijie Li. Point Cloud Registration Method Based on Combination of Convolutional Neural Network and Improved Harris-SIFT[J]. Laser & Optoelectronics Progress, 2020, 57(20): 201102
- Laser & Optoelectronics Progress
- Vol. 57, Issue 20, 201102 (2020)
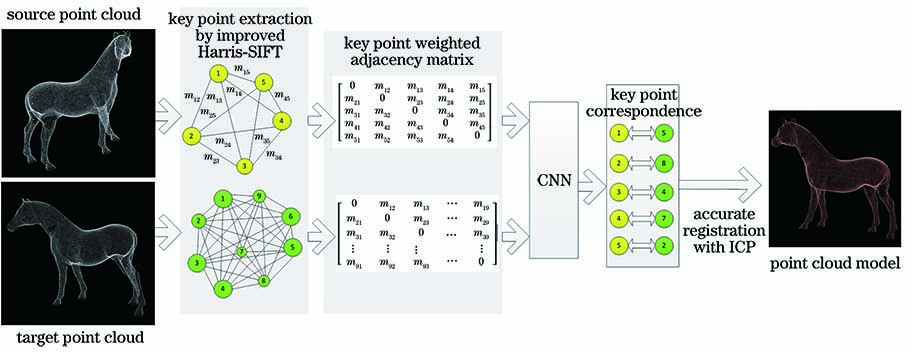
Fig. 1. Flow chart of point cloud registration method based on CNN combined with improved Harris-SIFT
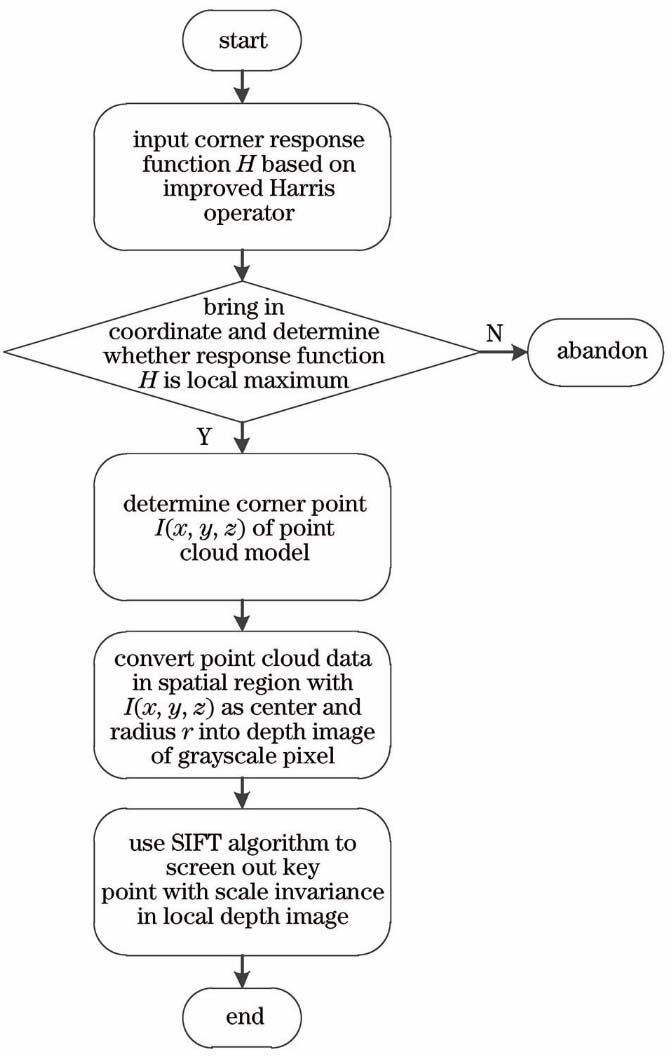
Fig. 2. Flow chart of improved Harris-SIFT algorithm to extract key points of point cloud
Fig. 3. Extracted key points of different models by improved Harris-SIFT algorithm. (a) Bunny model; (b) Horse model
Fig. 4. Structure of CNN model
Fig. 10. Registration results of Jishi tower point cloud model. (a) Before registration; (b) after coarse registration; (c) after accurate registration
Fig. 11. Comparison of registration effects of Jishi tower model. (a) ICP algorithm; (b) NV-TICP algorithm; (c) ISS-ICP algorithm
|
Table 1. Dataset information of point cloud model
|
Table 2. Key points detected in Bunny point cloud model
|
Table 3. Key points detected in Horse point cloud model
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Comparison of four registration methods under different point cloud models
|
Table 5. Dataset information of Jishi-tower point cloud model
| ||||||||||||||||||||||
Table 6. Comparison of registration effects of four registration methods in Jishi tower model

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20