
Lujiu Zha, Yonghua Xia, Bin Wang, Minglong Yang, Yirong Pan, Ruo Chen, Qi Zhu. Registration Method of Video Image and Laser Point Cloud Under Moving Measurement[J]. Laser & Optoelectronics Progress, 2022, 59(10): 1013001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 10, 1013001 (2022)
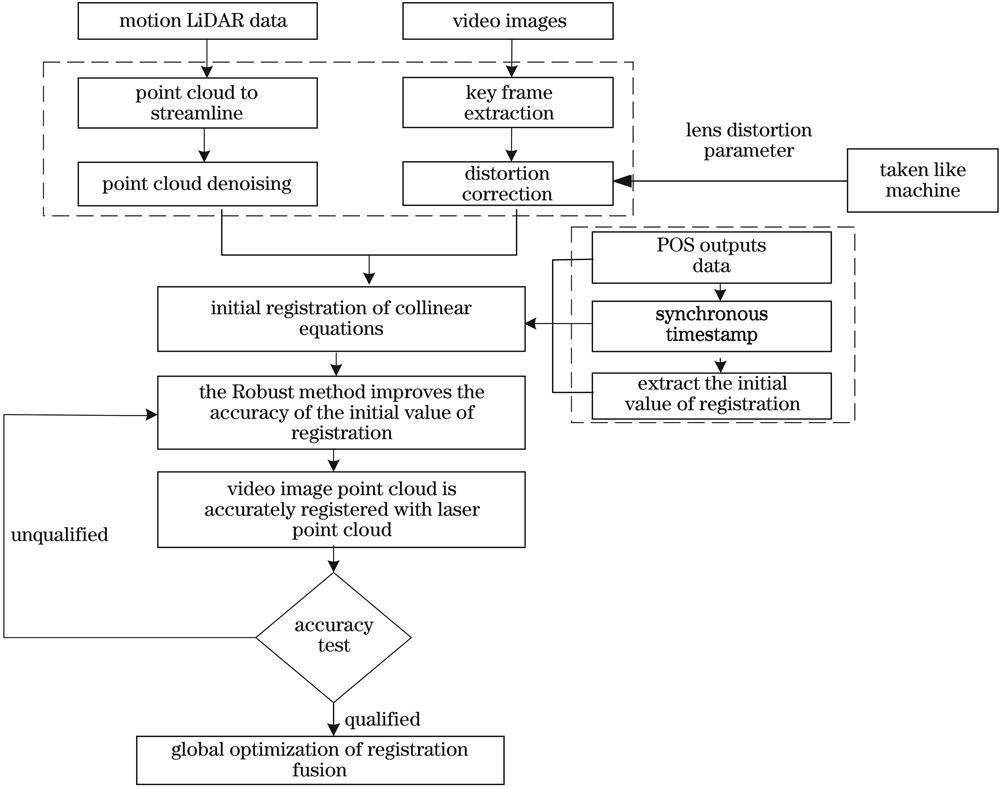
Fig. 1. Research technology road map
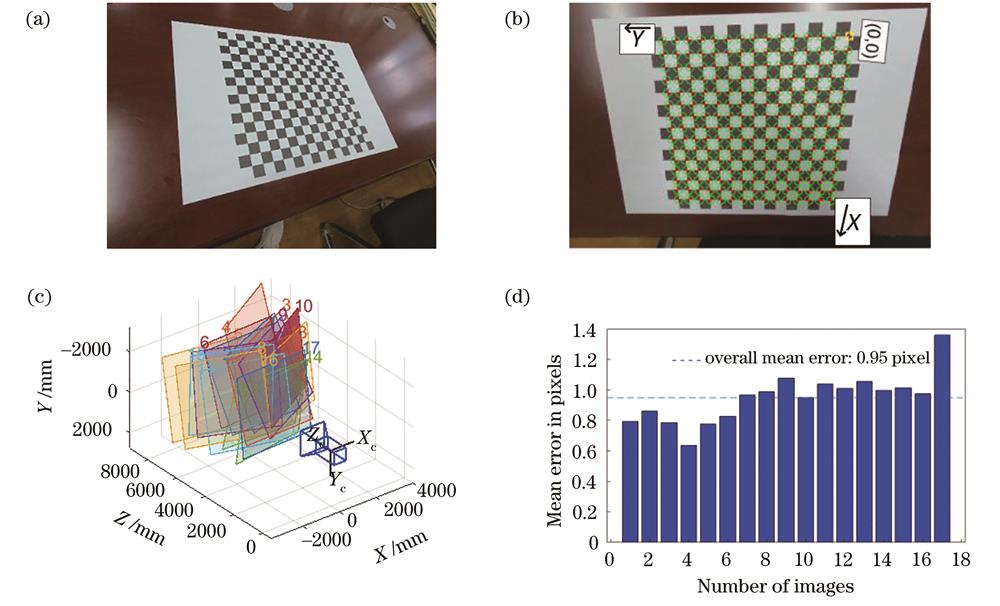
Fig. 2. Process diagram of Zhang Zhengyou camera calibration method realized by Matlab2020 program algorithm. (a) Checkerboard images obtained from different directions; (b) origin determination and corner detection of image coordinates; (c) positions of 17 checkerboard images in the image coordinate system; (d) parameter test accuracy of 17 checkerboard images
Fig. 3. Schematic of working mode of equipment integration installation
Fig. 4. Initial parameter registration effect. (a) Key frame position and shooting direction; (b) point cloud data backprojecting to key frames of video images
Fig. 5. Accurate registration effect of the iterative method of weight selection based on Robust estimation. (a) Registration effect without using Robust method to improve the accuracy of registration parameters; (b) registration effect using Robust method to improve the accuracy of registration parameters; (c) video image point cloud and laser point cloud registration fusion effect
Fig. 6. Schematic of point cloud 3D model reconstruction using the proposed method. (a) Laser point cloud of the base of the national flagpole; (b) point cloud of the national flagpole after registration;(c) reconstruction of 3D models of video images and laser point clouds
| |||||||||||||||||||||||||||||||||
Table 1. Camera calibration parameter table
| ||||||||||||||||||||||||||||||
Table 2. Relevant parameters of experimental instruments
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Accuracy test of registration results
|
Table 4. Comparison between the measured values and those of the 3D model

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20