
Qiancheng Ren. Method for Extraction of Point Cloud Feature Line[J]. Laser & Optoelectronics Progress, 2019, 56(6): 062803
- Laser & Optoelectronics Progress
- Vol. 56, Issue 6, 062803 (2019)
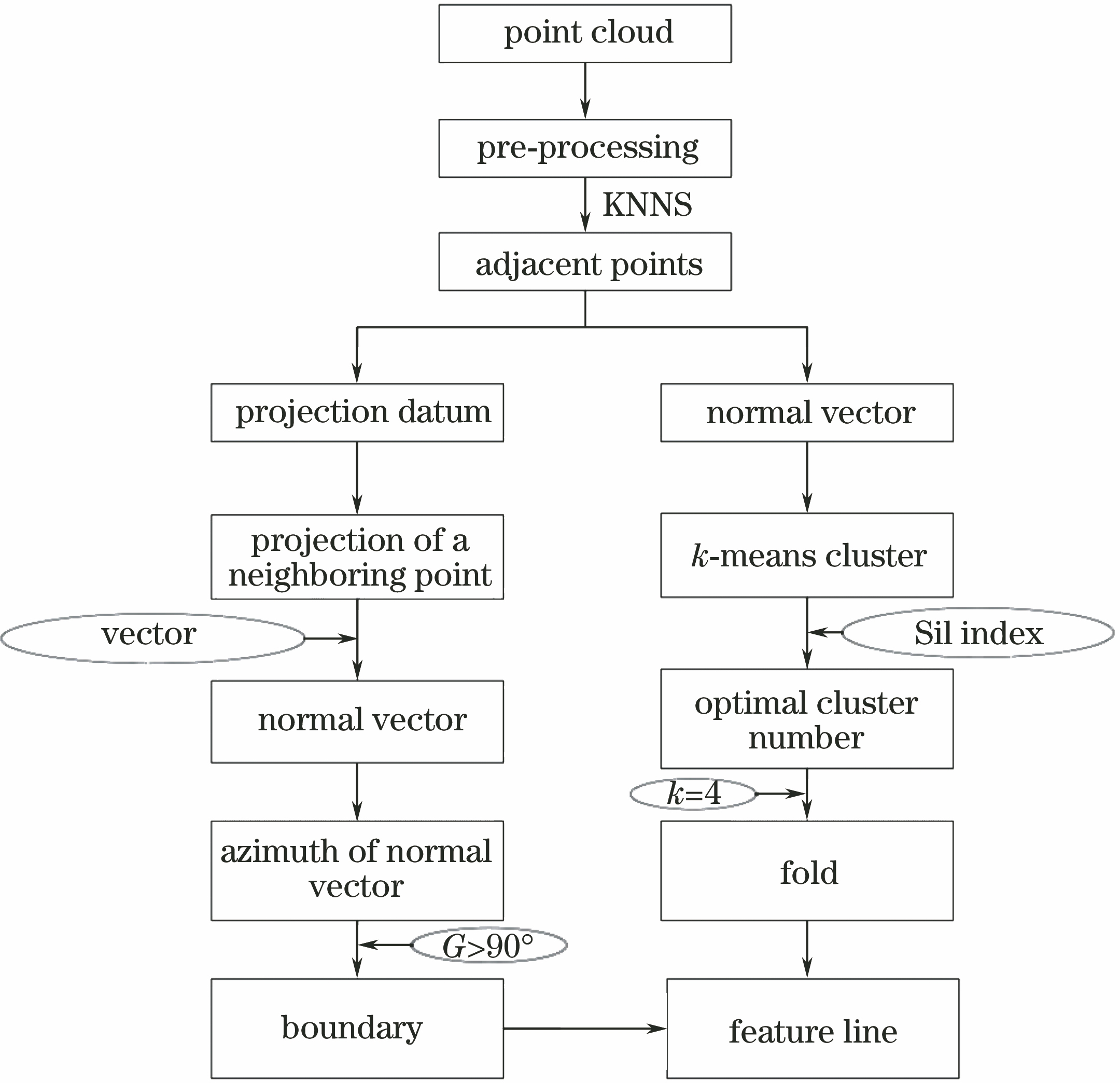
Fig. 1. Flow chart of feature line detection
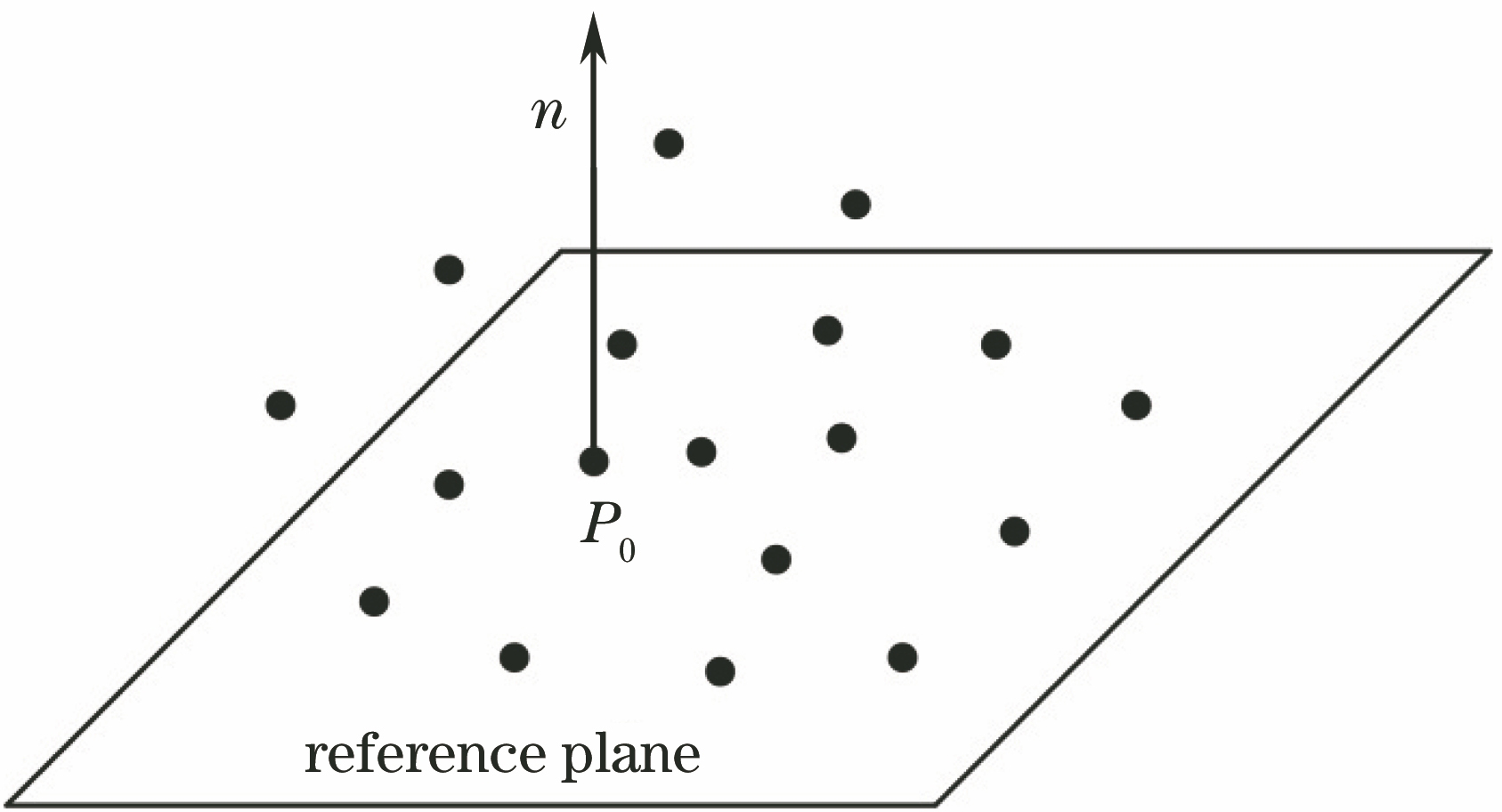
Fig. 2. Normal vector according to adjacent points
Fig. 3. Azimuthal angle of normal vectors on projection plane. (a) Point at boundary; (b) point in plane
Fig. 4. Maximum difference of azimuthal angles of adjacent normal vectors. (a) Under different range resolution; (b) under different neighborhood points
Fig. 5. Triangles composed by detection point and nearest neighbor points
Fig. 6. Cluster results of fold point detection. (a) Cluster of point normal vectors in plane; (b) cluster of point normal vectors on fold; (c) cluster of point normal vectors on curve
Fig. 7. Extraction of boundary. (a) Original point cloud; (b) improved RANSAC method; (c) proposed method
Fig. 8. Fold lines extracted by different methods under condition of plane construction. (a) Original point cloud; (b) based on curvature method; (c) based on plane method; (d) based on proposed method
Fig. 9. Fold lines extracted by different methods under condition of non-plane construction. (a) Original point cloud; (b) based on curvature method; (c) based on plane method; (d) based on proposed method
Fig. 10. Point cloud of bridge
Fig. 11. Extracted feature lines of bridge. (a) Feature lines extracted from first phase point cloud; (b) feature lines extracted from second phase point cloud

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20