
Han Lu, Qinwei Ma, Shaopeng Ma. Camera Array-Based Optical Measurement Approach and System for Occluded Targets[J]. Laser & Optoelectronics Progress, 2022, 59(8): 0815005
- Laser & Optoelectronics Progress
- Vol. 59, Issue 8, 0815005 (2022)
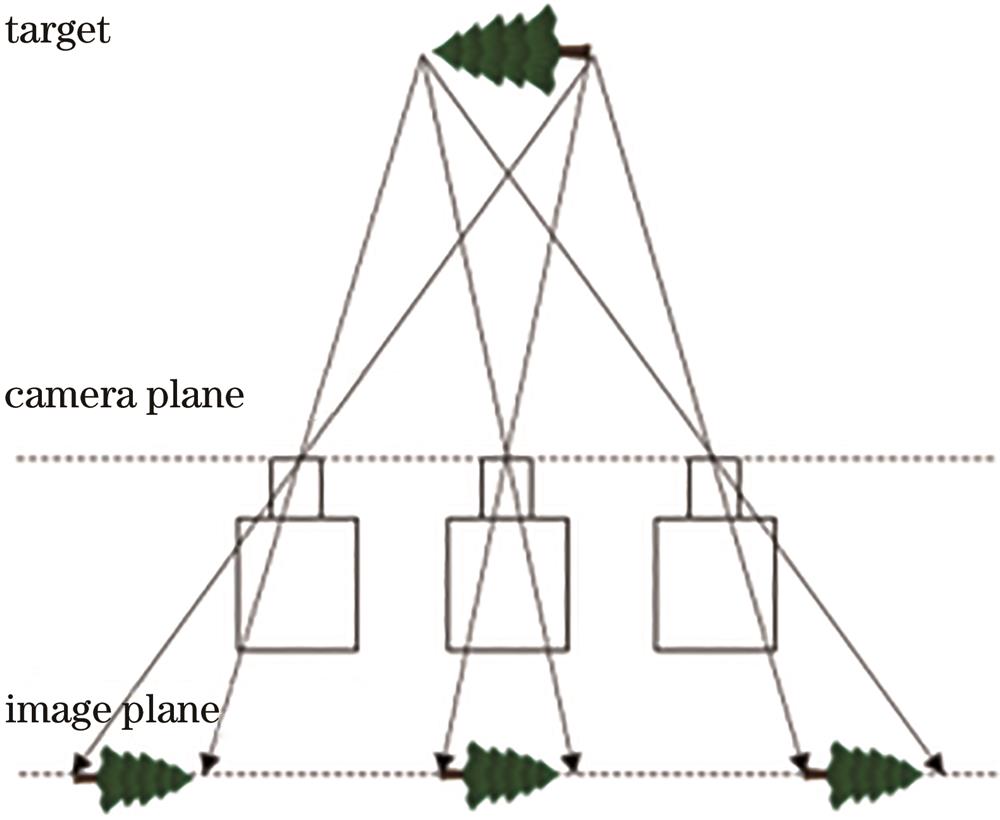
Fig. 1. Imaging model and parallax of planar camera array
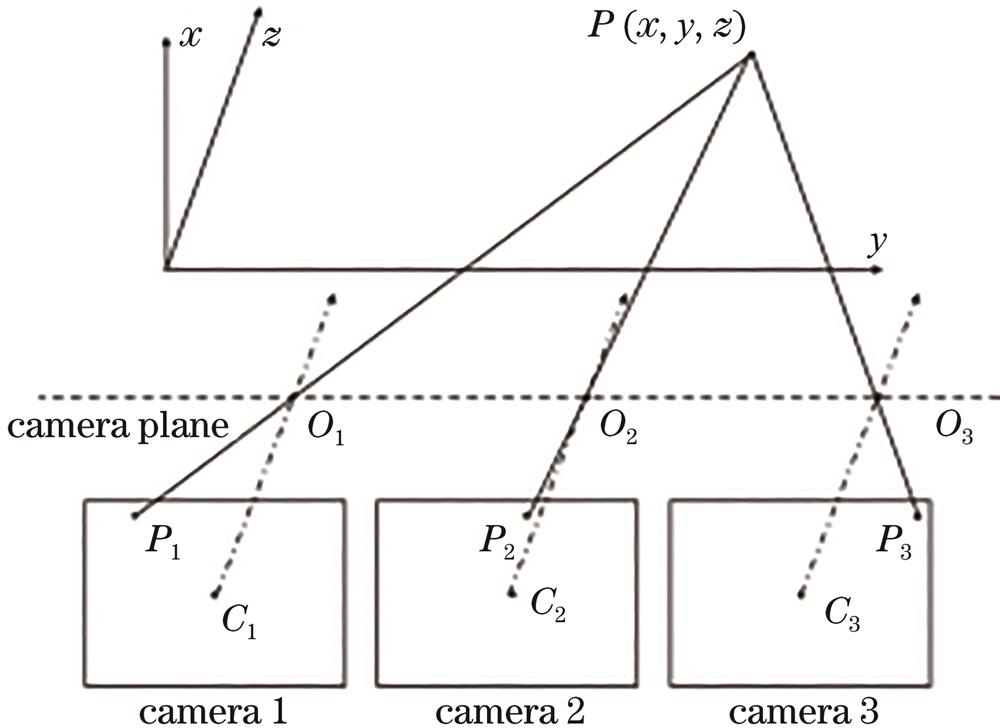
Fig. 2. Imaging model of a point in space
Fig. 3. Schematic of virtual camera array
Fig. 4. Simulated synthetic aperture imaging process
Fig. 5. Gray centroid method. (a) Ideal dot gray distribution; (b) dot gray distribution of synthetic image; (c) recognition position and theoretical value
Fig. 6. Synthetic image and fitting result. (a) Composite images with different number of cameras; (b) recognition result with different number of cameras; (c) recognition error with different number of cameras
Fig. 7. Corner identification method. (a) Conventional image marker points; (b) composite image marker points; (c) conventional image gray distribution; (d) composite image gray distribution
Fig. 8. Corner recognition method of synthetic image. (a) Corner gray distribution; (b) corner recognition result; (c) corner recognition number under different number of cameras
Fig. 9. Schematic of inner contour and outer contour
Fig. 10. Synthetic aperture image
Fig. 11. Contour iterative simulation. (a) Outline drawing; (b) least square fitting; (c) iterative fitting circle center; (d) area magnification; (e) relationship between iteration times and identification error
Fig. 12. Contour iteration method. (a) Grayscale distribution map; (b) identification points O1 and O2; (c) enlarged view; (d) final result O
Fig. 13. Raspberry Pi and CSI camera
Fig. 14. Synthetic aperture measurement system. (a) Proposed measurement system; (b) USB power supply system
Fig. 15. Experimental system and three marking points
Fig. 16. Original images, composite images, and recognition results of three kinds of marked point. (a) Proposed method; (b) gray centroid method; (c) corner identification method
Fig. 17. Comparison of the results obtained by proposed method and gray centroid method
Fig. 18. Schematic of motion measurement experiment
Fig. 19. Trajectory comparison. (a) Original image and synthetic aperture image; (b) recognition result
Fig. 20. Displacement curve of simple pendulum
Fig. 21. Deployable truss structure
Fig. 22. Original images and composite images. (a) Experiment 1; (b) experiment 2
Fig. 23. Recognition results. (a) Experiment 1; (b) experiment 2
Fig. 24. Fitted curves. (a) Experiment 1; (b) experiment 2

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20