
Lianqing Wang, Li Qian. Research on Robot Hand-Eye Calibration Method Based on Three-Dimensional Calibration Block[J]. Laser & Optoelectronics Progress, 2021, 58(24): 2433001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 24, 2433001 (2021)
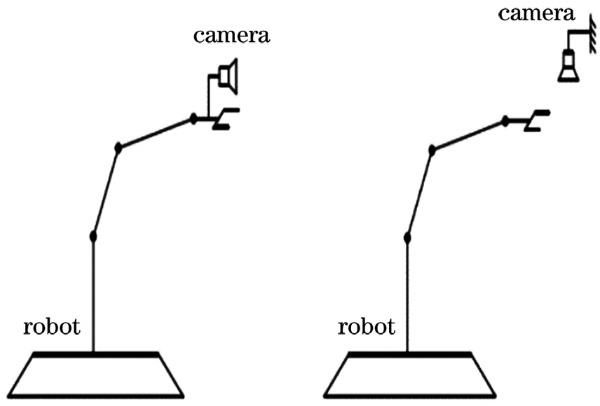
Fig. 1. Two hand eye calibration methods
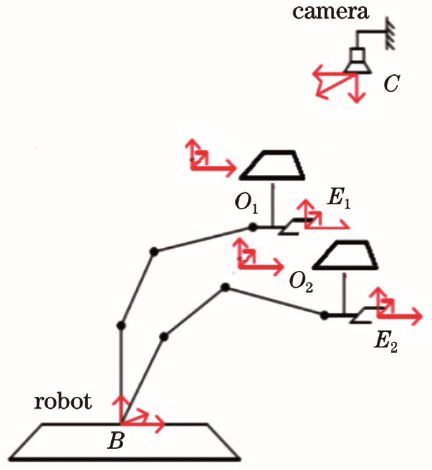
Fig. 2. Schematic of eye in hand system
Fig. 3. Establishment of calibration block coordinate system
Fig. 4. Calibration block
Fig. 5. Hand eye calibration scheme
Fig. 6. Positions of the point sets in marked plane
Fig. 7. Fitting plane to determine feature points
Fig. 8. Location of optimal solution coordinate system
Fig. 9. Accuracy comparison of proposed matching algorithm and traditional matching algorithms
Fig. 10. Time complexity comparison of proposed matching algorithm and traditional matching algorithms
Fig. 11. Hand eye calibration translation error
Fig. 12. Hand eye calibration rotation error
Fig. 13. Hand eye calibration translation error under different illuminations
Fig. 14. Hand eye calibration rotation error under different illuminations


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20