
Haoran Fu, Ke Bai, Yonggang Huang, Yihui Zhang. Recent progress of morphable 3D mesostructures in advanced materials[J]. Journal of Semiconductors, 2020, 41(4): 041604
- Journal of Semiconductors
- Vol. 41, Issue 4, 041604 (2020)
Abstract
1. Introduction
The fast development of robotics and semiconductor fabrication techniques means that robots are now evolving towards miniaturization to fulfill various emerging needs in military and medical applications, such as invisible environment monitoring, and navigation through complex and confined space (e.g., vessels in human body). However, it is challenging to scale down conventional, rigid robots to millimeter and micrometer size, due to the degradation of electromagnetic motor performance and the increase of frictional losses in bearings[
According to different external stimuli, the reconfiguration methods can be mainly classified into six categories; that is, methods activated by thermal, chemical, optical, magnetic, electric, and mechanical fields. In this paper, we present a detailed review of methodologies for morphable mesostructures triggered by these stimuli. We also highlight the latest progress in the design concepts and applications. This review begins with an overview on the thermally activated reconfiguration method in Section 2, followed by the discussion of chemically, optically, magnetically, electrically, and mechanically responsive reconfiguration approaches in Sections 3 to 7. Finally, we provide a perspective on current challenges and opportunities for future research.
2. Methods and applications of thermally actuated reconfiguration
Thermally actuated reconfiguration approaches utilize shape-memory polymers[
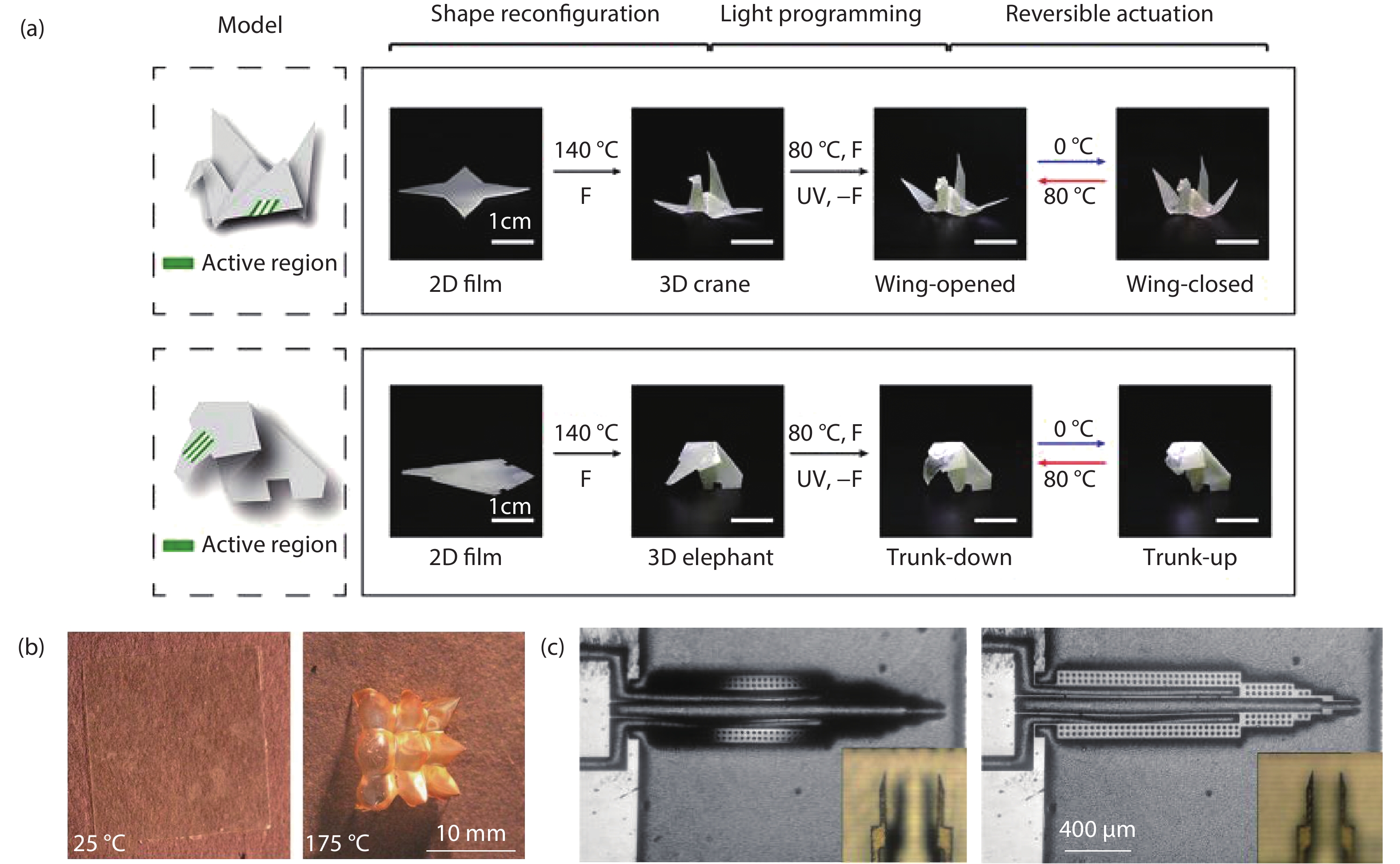
SMPs are one of the most commonly used active materials for thermally activated reconfiguration. In contrast to traditional SMPs, with one-way actuation governed by the glass transition temperature, reversible SMPs are determined by two temperatures: Tg, the glass transition point, and Tlow, a lower glass transition point. After the material is deformed by an external force above Tg, it retains the temporary geometry (shape A) upon cooling to below Tlow. When it is reheated to an intermediate temperature between Tlow and Tg, a third configuration (shape B) occurs. Two-way SMP can be reshaped between A and B by changing the temperature, as long as the temperature remains below Tg[
![]()
Figure 1.(Color online) Methods and applications of thermally actuated reconfiguration. (a) Shape evolution of two morphable mesostructures made of shape-memory polymers. Reproduced with permission from Ref. [
Multilayers with different thermal expansion coefficients[
LCEs are a kind of hybrid materials, in which polymer chains are crosslinked with oriented liquid crystal units, due to the chemical synthesis. Upon heating, mesogen chains are rearranged from anisotropic conformation to coil conformation, resulting in a reversible phase transition of the material, and accordingly, a shape change of the mesostructures[
Two-way SMAs are a group of metallic alloys that can experience the phase transition between martensitic and austenitic crystal structures, providing a route to the reconfiguration of their shapes or sizes. Once its temperature exceeds the austenite-start temperature, SMA begins to shrink and transform from martensite to austenite phase. When it is re-cooled below the martensite-start temperature, it can revert to martensite phase again. This transformation can produce significant strain and actuation force, with an energy density as high as 1226 J/kg[
Transition metal oxides represent another type of inorganic phase-change material. Among them, vanadium dioxide (VO2) is widely used for actuators and morphable mesostructures, owing to its high work density (~7 J/cm3)[
3. Methods and applications of chemically actuated reconfiguration
Most of the chemically actuated reconfiguration approaches rely on a liquid environment. When immersed in water, acids, organic solvents or ionic solution, soft materials (i.e., hydrogels) and inorganic materials (i.e., palladium and iron phosphate) can absorb chemicals, and then mechanical stresses arise inside the material, leading to a reversible volume expansion. The response time based on this type of approaches varies a lot, ranging from several hundred milliseconds[
By exploiting swelling deformations, diverse morphable mesostructures can be achieved with appropriate design of hydrogel multilayers[
![]()
Figure 2.(Color online) Methods and applications of chemically actuated reconfiguration. (a) Shape evolution of an ionoprinted hydrogel subject to different solvents. Reproduced with permission from Ref. [
Another reconfiguration approach utilizes the change of swelling ratio in multilayers when subject to a variant pH[
4. Methods and applications of optically actuated reconfiguration
Optically actuated reconfiguration approaches offer the advantage of remote control and precise activation in localized region[
The direct activation methods utilize photoresponsive materials such as liquid-crystal elastomers and shape-memory polymers that are sensitive to the wavelength or polarization of the light. The photoresponsive SMPs are processed similarly with the thermally responsive SMPs, except that they are controlled by irradiation in different wavelength[
![]()
Figure 3.(Color online) Methods and applications of optically actuated reconfiguration. (a) Bending of a cantilever made of LCE with azobenzene under the exposure of light with different polarization angles. Reproduced with permission from Ref. [
In contrast from the direct methods, the indirect activation methods exploit intermediates generated by light to reshape mesostructures. For instance, Tang et al. demonstrated photochemically induced actuation of liquid metal marbles[
5. Methods and applications of magnetically actuated reconfiguration
Magnetically responsive morphable mesostructures are typically based on soft materials that incorporate magnetic particles[
Generally, there are two ways to fabricate morphable mesostructures with magnetic particles. One is to load magnetic particles such as neodymium-iron-boron (NdFeB)[
![]()
Figure 4.(Color online) Methods and applications of magnetically actuated reconfiguration. (a) Milli-robots made of magnetoelastic soft materials. Reproduced with permission from Ref. [
Another approach to fabricate morphable mesostructures with magnetic particles is through the additive manufacture of elastomer composite containing magnetic particles. After dispersing magnetic particles in composite ink, a magnetic field is applied to the microfluidic channel[
Fabrication of morphable mesostructures with individual magnets is relatively simple, as compared to those with magnetic particles. By embedding two permanent magnets to a scallop-like polydimethylsiloxane (PDMS) structure with glue, a single-hinge submillimeter-size swimmer can be achieved, which is capable of propelling in fluids by reciprocal motion, when actuated by an rotating magnetic field[
6. Methods and applications of electrically actuated reconfiguration
Electrically responsive morphable mesostructures typically utilized dielectric elastomers (DEs)[
DEs can produce a large actuation strain when two opposite sides are attached to electrodes with different potentials. Coulomb forces drive electrodes closer to each other, and cause an in-plane expansion. When dispersing percolating network of metallic nanowires over the surface of DE, the flat surface can be reversibly and deterministically deformed into non-uniform wavy shapes[
![]()
Figure 5.(Color online) Methods and applications of electrically actuated reconfiguration. (a) Schematic illustration of a robotic fish made of DE (left-hand panel), and forward motion of the fish (right-hand panel). Reproduced with permission from Ref. [
IPMC is composed of ion-conducting polymer with electrodes on both sides. Upon hydration, the positive ions in the polymer can move freely, whereas the negative ions are bonded with carbon chains in the polymer. When a voltage is applied to the electrodes, the positively charged ions move to the cathode, and a bending effect occurs due to the uneven distribution of molecules[
Due to their stable thermal and chemical properties[
7. Methods and applications of mechanically actuated reconfiguration
Mechanically actuated reconfiguration approaches are developed based on the buckling-guided assembly that exploits prestrained elastomer platform to provide mechanical forces to drive the 3D assembly[
This type of reconfiguration approach relies on different strain release paths of substrates to reshape the spatial geometries[
![]()
Figure 6.(Color online) Methods and applications of mechanically actuated reconfiguration through the use of different strain release paths. (a) Illustration of the strategy through a sequence of FEA results and a pair of colorized SEM images for the two stable configurations. (b) SEM images and FEA predictions of morphable, recognizable objects. (c) Exploded view of the layer construction for a morphable electromagnetic device with shielding capability. (d) Optical images and FEA predictions of the device. (e) Simulated radiant efficiency of three antennas at two different stable shapes. Reproduced with permission from Ref. [
Engineered kirigami cuts of the substrate were developed to facilitate the reconfiguration of the mesostructures[
![]()
Figure 7.(Color online) Methods and applications of mechanically actuated reconfiguration assisted by kirigami substrate designs. (a) Conceptual illustration of the fabrication process, through a sequence of FEA results. (b) Two-dimensional geometries, FEA predictions, and scanning electron microscope images of a 3D morphable trilayer microstructure as mechanically tunable optical chiral metamaterials. (c) Measured and simulated optical circular dichroism of the 3D trilayer microstructure with two 3D shapes in the 0.2–0.4-THz frequency range. Reproduced with permission from Ref. [
8. Summary and outlook
This paper offered a detailed overview of reconfiguration methodologies of 3D mesostructures with feature sizes that range from submicrons to centimeters. The reconfiguration can be achieved by thermal, chemical, optical, electric, magnetic, or mechanical means, through use of diverse materials such as soft polymers, metals, and their heterogeneous combinations, as summarized in Table 1.
Although remarkable progress has been made in the area of 3D reconfiguration approaches, many challenges remain and fruitful opportunities exist for future exploration. Some of these approaches need a long actuation time to trigger reconfiguration, such as the thermal actuation (response time around 1–10 s, except for VO2-based actuation), the indirect light actuation (~30 s), and the chemical actuation (more than 1 min for some hydrogels swelling). Besides, morphable mesostructures activated directly by light are usually in low thermal stabilities because the cis-azobenzene tends to destabilize the phase structures of the LCE mixture, resulting in a failure of shape reconfiguration. The magnetic reconfiguration methods can only generate a low actuation force that scales with the structure volume (L3) and decreases exponentially as L shrinks. This feature limits their applications at microscale. Electrically responsive materials such as DEs require high driving voltages on the order of kV, which are often close to the electrical breakdown voltage of materials. Mechanically actuated reconfiguration methods involve a complex transformation process that depends not only on the layouts of 2D precursor but also on the substrate designs and loading strategy. Together with the non-linearity of bifurcation induced by buckling, the inverse design to achieve two desired stable configurations is very challenging. Except for the mechanical reconfiguration method, almost all of the other reconfiguration methods are not compatible with state-of-the-art semiconductor technologies, and their deformations are mainly limited to bending/folding, contraction, and expansion. Finally, compared with multi-functional devices depending on other reconfiguration methods, such as switching components or smart materials (sensitive in electric permittivity or magnetic permeability), the morphable devices based on physical reconfiguration methods may have a lower degree of integration, which means that only limited functions can be achieved by reconfiguration.
In addition to solving the challenges of reconfiguration approaches mentioned above, some other research directions are also essential for the development of reconfiguration technology. One significant segment of research interest for morphable mesostructures is related to the biomedical applications for in-body diagnosis and treatment. Consequently, it is desirable to develop more biocompatible active materials that can operate upon safe stimuli condition. Moreover, deformation control principles that predict the correlation between geometric configuration and the property of stimuli play an important role in the inverse design and practical applications.
References
[1] L Hines, K Petersen, G Z Lum et al. Soft actuators for small-scale robotics. Adv Mater, 29, 1603483(2017).
[2] A Kotikian, C McMahan, E C Davidson et al. Untethered soft robotic matter with passive control of shape morphing and propulsion. Sci Robot, 4, eaax7044(2019).
[3] I A Anderson, T A Gisby, T G McKay et al. Multi-functional dielectric elastomer artificial muscles for soft and smart machines. J Appl Phys, 112, 041101(2012).
[4] X Cheng, Y Zhang. Micro/nanoscale 3D assembly by rolling, folding, curving, and buckling approaches. Adv Mater, 31, 1901895(2019).
[5] H Zhao, K Li, M Han et al. Buckling and twisting of advanced materials into morphable 3D mesostructures. Proc Natl Academ Sci United States Am, 116, 13239(2019).
[6] G Z Lum, Z Ye, X Dong et al. Shape-programmable magnetic soft matter. Proceedings of the National Academy of Sciences of the United States of America, 113, E6007(2016).
[7] A Lendlein, O E C Gould. Reprogrammable recovery and actuation behaviour of shape-memory polymers. Nat Rev Mater, 4, 116(2019).
[8] Y Liu, J Genzer, M D Dickey. "2D or not 2D": Shape-programming polymer sheets. Prog Polym Sci, 52, 79(2016).
[9] B Xu, B Zhang, L Wang et al. Tubular micro/nanomachines: from the basics to recent advances. Adv Funct Mater, 28, 1705872(2018).
[10] J Li, T Liu, S Xia et al. A versatile approach to achieve quintuple-shape memory effect by semi-interpenetrating polymer networks containing broadened glass transition and crystalline segments. J Mater Chem, 21, 12213(2011).
[11] M D Hager, S Bode, C Weber et al. Shape memory polymers: past, present and future developments. Prog Polym Sci, 49/50, 3(2015).
[12] T Xie. Tunable polymer multi-shape memory effect. Nature, 464, 267(2010).
[13] M Behl, K Kratz, U Noechel et al. Temperature-memory polymer actuators. Proceedings of the National Academy of Sciences of the United States of America, 110, 12555(2013).
[14] Y Wang, A Villada, Y Zhai et al. Tunable surface wrinkling on shape memory polymers with application in smart micromirror. Appl Phys Lett, 114, 193701(2019).
[15] Y Wang, Y Zhai, A Villada et al. Programmable localized wrinkling of thin films on shape memory polymers with application in nonuniform optical gratings. Appl Phys Lett, 112, 251603(2018).
[16] M Noh, S W Kim, S An et al. Flea-inspired catapult mechanism for miniature jumping robots. IEEE Trans Robot, 28, 1007(2012).
[17] Y Q Fu, H J Du, W M Huang et al. TiNi-based thin films in MEMS applications: a review. Sens Actuators A, 112, 395(2004).
[18] Y Q Fu, J K Luo, A J Flewitt et al. Microactuators of free-standing TiNiCu films. Smart Mater Struct, 16, 2651(2007).
[19] K Liu, C Cheng, J Suh et al. Powerful, multifunctional torsional micromuscles activated by phase transition. Adv Mater, 26, 1746(2014).
[20] T Wang, D Torres, F E Fernandez et al. Maximizing the performance of photothermal actuators by combining smart materials with supplementary advantages. Sci Adv, 3, e1602697(2017).
[21] A Rúa, F E Fernández, N Sepúlveda. Bending in VO2-coated microcantilevers suitable for thermally activated actuators. J Appl Phys, 107, 074506(2010).
[22] T H Ware, M E McConney, J J Wie et al. Voxelated liquid crystal elastomers. Science, 347, 982(2015).
[23] L T de Haan, V Gimenez-Pinto, A Konya et al. Accordion-like actuators of multiple 3D patterned liquid crystal polymer films. Adv Funct Mater, 24, 1251(2014).
[24] Y Yang, Z Pei, Z Li et al. Making and remaking dynamic 3D structures by shining light on flat liquid crystalline vitrimer films without a mold. J Am Chem Soc, 138, 2118(2016).
[25] C Ahn, X Liang, S Cai. Inhomogeneous stretch induced patterning of molecular orientation in liquid crystal elastomers. Extrem Mechan Lett, 5, 30(2015).
[26] Z Pei, Y Yang, Q Chen et al. Mouldable liquid-crystalline elastomer actuators with exchangeable covalent bonds. Nat Mater, 13, 36(2014).
[27] E Bormashenko, Y Bormashenko, R Pogreb et al. Janus droplets: liquid marbles coated with dielectric/semiconductor particles. Langmuir, 27, 7(2011).
[28] M Lemanowicz, A Gierczycki, W Kuznik et al. Determination of lower critical solution temperature of thermosensitive flocculants. Miner Eng, 69, 170(2014).
[29] G Stoychev, S Turcaud, J W C Dunlop et al. Hierarchical multi-step folding of polymer bilayers. Adv Funct Mater, 23, 2295(2013).
[30] V Stroganov, M Al-Hussein, J U Sommer et al. Reversible thermosensitive biodegradable polymeric actuators based on confined crystallization. Nano Lett, 15, 1786(2015).
[31] E Wang, M S Desai, S W Lee. Light-controlled graphene-elastin composite hydrogel actuators. Nano Lett, 13, 2826(2013).
[32] B Jin, H Song, R Jiang et al. Programming a crystalline shape memory polymer network with thermo- and photo-reversible bonds toward a single-component soft robot. Sci Adv, 4, eaao3865(2018).
[33] S Wall, D Wegkamp, L Foglia et al. Ultrafast changes in lattice symmetry probed by coherent phonons. Nat Commun, 3, 721(2012).
[34] J Cao, E Ertekin, V Srinivasan et al. Strain engineering and one-dimensional organization of metal-insulator domains in single-crystal vanadium dioxide beams. Nat Nanotechnol, 4, 732(2009).
[35] S Fusco, M S Sakar, S Kennedy et al. An integrated microrobotic platform for on-demand, targeted therapeutic interventions. Adv Mater, 26, 952(2014).
[36] S Miyashita, L Meeker, M T Tolley et al. Self-folding miniature elastic electric devices. Smart Mater Struct, 23, 094005(2014).
[37] G Stoychev, N Puretskiy, L Ionov. Self-folding all-polymer thermoresponsive microcapsules. Soft Matter, 7, 3277(2011).
[38] C Yoon, R Xiao, J Park et al. Functional stimuli responsive hydrogel devices by self-folding. Smart Mater Struct, 23, 094008(2014).
[39] R Verduzco. Shape-shifting liquid crystals. Science, 347, 949(2015).
[40] S Palagi, A G Mark, S Y Reigh et al. Structured light enables biomimetic swimming and versatile locomotion of photoresponsive soft microrobots. Nat Mater, 15, 647(2016).
[41] Y Cui, C Wang, K Sim et al. A simple analytical thermo-mechanical model for liquid crystal elastomer bilayer structures. AIP Adv, 8, 025215(2018).
[42] C Wang, K Sim, J Chen et al. Soft ultrathin electronics innervated adaptive fully soft robots. Adv Mater, 30, 1706695(2018).
[43] Q He, Z Wang, Y Wang et al. Electrically controlled liquid crystal elastomer-based soft tubular actuator with multimodal actuation. Sci Adv, 5, eaax5746(2019).
[44] S Kim, E Hawkes, K Cho et al. Micro artificial muscle fiber using NiTi spring for soft robotics. 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2228(2009).
[45] M S M Ali, K Takahata. Frequency-controlled wireless shape-memory-alloy microactuators integrated using an electroplating bonding process. Sens Actuators A, 163, 363(2010).
[46] J Colorado, A Barrientos, C Rossi et al. Biomechanics of smart wings in a bat robot: morphing wings using SMA actuators. Bioinspir Biomimet, 7, 036006(2012).
[47] S J Furst, G Bunget, S Seelecke. Design and fabrication of a bat-inspired flapping-flight platform using shape memory alloy muscles and joints. Smart Mater Struct, 22, 014011(2012).
[48] K Liu, C Cheng, Z Cheng et al. Giant-amplitude, high-work density microactuators with phase transition activated nanolayer bimorphs. Nano Lett, 12, 6302(2012).
[49] K Wang, C Cheng, E Cardona et al. Performance limits of microactuation with vanadium dioxide as a solid engine. ACS Nano, 7, 2266(2013).
[50] Z Tian, W Huang, B Xu et al. Anisotropic rolling and controlled chirality of nanocrystalline diamond nanomembranes toward biomimetic helical frameworks. Nano Lett, 18, 3688(2018).
[51] Q Zhao, J W C Dunlop, X Qiu et al. An instant multi-responsive porous polymer actuator driven by solvent molecule sorption. Nat Commun, 5, 4293(2014).
[52] R Xiao, J Guo, D L Safranski et al. Solvent-driven temperature memory and multiple shape memory effects. Soft Matter, 11, 3977(2015).
[53] W M Huang, B Yang, L An et al. Water-driven programmable polyurethane shape memory polymer: Demonstration and mechanism. Appl Phys Lett, 86, 114105(2005).
[54] M Ma, L Guo, D G Anderson et al. Bio-inspired polymer composite actuator and generator driven by water gradients. Science, 339, 186(2013).
[55] X Chen, D Goodnight, Z Gao et al. Scaling up nanoscale water-driven energy conversion into evaporation-driven engines and generators. Nat Commun, 6, 7346(2015).
[56] B P Lee, S Konst. Novel hydrogel actuator inspired by reversible mussel adhesive protein chemistry. Adv Mater, 26, 3415(2014).
[57] M Jamal, A M Zarafshar, D H Gracias. Differentially photo-crosslinked polymers enable self-assembling microfluidics. Nat Commun, 2, 527(2011).
[58] J Kim, J A Hanna, M Byun et al. Designing responsive buckled surfaces by halftone gel lithography. Science, 335, 1201(2012).
[59] A S Gladman, E A Matsumoto, R G Nuzzo et al. Biomimetic 4D printing. Nat Mater, 15, 413(2016).
[60] E Palleau, D Morales, M D Dickey et al. Reversible patterning and actuation of hydrogels by electrically assisted ionoprinting. Nat Commun, 4, 2257(2013).
[61] H Lee, C Xia, N X Fang. First jump of microgel; actuation speed enhancement by elastic instability. Soft Matter, 6, 4342(2010).
[62] H Zhang, X Guo, J Wu et al. Soft mechanical metamaterials with unusual swelling behavior and tunable stress-strain curves. Sci Adv, 4, eaar8535(2018).
[63] A Ollagnier, A Fabre, T Thundat et al. Activation process of reversible Pd thin film hydrogen sensors. Sens Actuators B, 186, 258(2013).
[64] B Xu, X Zhang, Z Tian et al. Microdroplet-guided intercalation and deterministic delamination towards intelligent rolling origami. Nat Commun, 10, 5019(2019).
[65] B Xu, Z Tian, J Wang et al. Stimuli-responsive and on-chip nanomembrane micro-rolls for enhanced macroscopic visual hydrogen detection. Sci Adv, 4, eaap8203(2018).
[66] A Gestos, P G Whitten, G G Wallace et al. Actuating individual electrospun hydrogel nanofibres. Soft Matter, 8, 8082(2012).
[67] P Techawanitchai, M Ebara, N Idota et al. Photo-switchable control of pH-responsive actuators via pH jump reaction. Soft Matter, 8, 2844(2012).
[68] C Ma, T Li, Q Zhao et al. Supramolecular Lego assembly towards three-dimensional multi-responsive hydrogels. Adv Mater, 26, 5665(2014).
[69] L Dong, A K Agarwal, D J Beebe et al. Adaptive liquid microlenses activated by stimuli-responsive hydrogels. Nature, 442, 551(2006).
[70] Y Yu, T Ikeda. Soft actuators based on liquid-crystalline elastomers. Angew Chem Int Ed, 45, 5416(2006).
[71] M F Yu, B S Files, S Arepalli et al. Tensile loading of ropes of single wall carbon nanotubes and their mechanical properties. Phys Rev Lett, 84, 5552(2000).
[72] J Wei, Y Yu. Photodeformable polymer gels and crosslinked liquid-crystalline polymers. Soft Matter, 8, 8050(2012).
[73] T J White, N V Tabiryan, S V Serak et al. A high frequency photodriven polymer oscillator. Soft Matter, 4, 1796(2008).
[74] H Zeng, P Wasylczyk, C Parmeggiani et al. Light-fueled microscopic walkers. Adv Mater, 27, 3883(2015).
[75] X Tang, S Y Tang, V Sivan et al. Photochemically induced motion of liquid metal marbles. Appl Phys Lett, 103, 174104(2013).
[76] A Lendlein, H Y Jiang, O Junger et al. Light-induced shape-memory polymers. Nature, 434, 879(2005).
[77] H Y Jiang, S Kelch, A Lendlein. Polymers move in response to light. Adv Mater, 18, 1471(2006).
[78] Y L Yu, M Nakano, T Ikeda. Directed bending of a polymer film by light. Nature, 425, 145(2003).
[79] A Natansohn, P Rochon. Photoinduced motions in azo-containing polymers. Chem Rev, 102, 4139(2002).
[80] K M Lee, H Koerner, R A Vaia et al. Light-activated shape memory of glassy, azobenzene liquid crystalline polymer networks. Soft Matter, 7, 4318(2011).
[81] C Huang, J A Lv, X Tian et al. Miniaturized swimming soft robot with complex movement actuated and controlled by remote light signals. Sci Rep, 5, 17414(2015).
[82] M Yamada, M Kondo, J Mamiya et al. Photomobile polymer materials: towards light-driven plastic motors. Angew Chem, 47, 4986(2008).
[83] M Boncheva, S A Andreev, L Mahadevan et al. Magnetic self-assembly of three-dimensional surfaces from planar sheets. Proc Natl Academ Sci United States of Am, 102, 3924(2005).
[84] A A Solovev, S Sanchez, M Pumera et al. Nanomotors: magnetic control of tubular catalytic microbots for the transport, assembly, and delivery of micro-objects. Adv Funct Mater, 20, 2430(2010).
[85] S Fusco, H W Huang, K E Peyer et al. Shape-switching microrobots for medical applications: the influence of shape in drug delivery and locomotion. Acs Appl Mater Interfaces, 7, 6803(2015).
[86] S Tasoglu, E Diller, S Guven et al. Untethered micro-robotic coding of three-dimensional material composition. Nat Commun, 5, 3124(2014).
[87] E Diller, J Giltinan, G Z Lum et al. Six-degree-of-freedom magnetic actuation for wireless microrobotics. Int J Robot Res, 35, 114(2016).
[88] E Diller, J Zhuang, G Z Lum et al. Continuously distributed magnetization profile for millimeter-scale elastomeric undulatory swimming. Appl Phys Lett, 104, 174101(2014).
[89] B Jang, E Gutman, N Stucki et al. Undulatory locomotion of magnetic multilink nanoswimmers. Nano Lett, 15, 4829(2015).
[90] J V I Timonen, M Latikka, L Leibler et al. Switchable static and dynamic self-assembly of magnetic droplets on superhydrophobic surfaces. Science, 341, 253(2013).
[91] T Jamin, C Py, E Falcon. Instability of the origami of a ferrofluid drop in a magnetic field. Phys Rev Lett, 107, 204503(2011).
[92] W Hu, G Z Lum, M Mastrangeli et al. Small-scale soft-bodied robot with multimodal locomotion. Nature, 554, 81(2018).
[93] P Garstecki, P Tierno, D B Weibel et al. Propulsion of flexible polymer structures in a rotating magnetic field. J Phys Conden Matter, 21, 204110(2009).
[94] J Kim, S E Chung, S E Choi et al. Programming magnetic anisotropy in polymeric microactuators. Nat Mater, 10, 747(2011).
[95] Y Kim, H Yuk, R Zhao et al. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature, 558, 274(2018).
[96] Y Kim, G A Parada, S Liu et al. Ferromagnetic soft continuum robots. Sci Robot, 4, eaax7329(2019).
[97] T Qiu, T C Lee, A G Mark et al. Swimming by reciprocal motion at low Reynolds number. Nat Commun, 5, 5119(2014).
[98] S Yim, M Sitti. Design and rolling locomotion of a magnetically actuated soft capsule endoscope. IEEE Trans Robot, 28, 183(2012).
[99] S Yim, M Sitti. Shape-programmable soft capsule robots for semi-implantable drug delivery. IEEE Trans Robot, 28, 1198(2012).
[100] P Brochu, Q Pei. Advances in dielectric elastomers for actuators and artificial muscles. Macromolecul Rapid Commun, 31, 10(2010).
[101] I S Park, K Jung, D Kim et al. Physical principles of ionic polymer-metal composites as electroactive actuators and sensors. MRS Bull, 33, 190(2008).
[102] C Miehe, D Rosato. A rate-dependent incremental variational formulation of ferroelectricity. Int J Eng Sci, 49, 466(2011).
[103] T Mirfakhrai, J Oh, M Kozlov et al. Electrochemical actuation of carbon nanotube yarns. Smart Mater Struct, 16, S243(2007).
[104] J Foroughi, G M Spinks, G G Wallace et al. Torsional carbon nanotube artificial muscles. Science, 334, 494(2011).
[105] I Must, F Kaasik, I Põldsalu et al. Ionic and capacitive artificial muscle for biomimetic soft robotics. Adv Eng Mater, 17, 84(2015).
[106] V Palmre, D Pugal, K J Kim et al. Nanothorn electrodes for ionic polymer-metal composite artificial muscles. Sci Rep, 4, 6176(2014).
[107] S Shian, D R Clarke. Electrically-tunable surface deformation of a soft elastomer. Soft Matter, 12, 3137(2016).
[108] J Shintake, S Rosset, B Schubert et al. Versatile soft grippers with intrinsic electroadhesion based on multifunctional polymer actuators. Adv Mater, 28, 231(2016).
[109] G Kofod, W Wirges, M Paajanen et al. Energy minimization for self-organized structure formation and actuation. Appl Phys Lett, 90, 081916(2007).
[110] T Li, G Li, Y Liang et al. Fast-moving soft electronic fish. Sci Adv, 3, e1602045(2017).
[111] W S Chu, K T Lee, S H Song et al. Review of biomimetic underwater robots using smart actuators. Int J Prec Eng Manufact, 13, 1281(2012).
[112] M Aureli, V Kopman, M Porfiri. Free-locomotion of underwater vehicles actuated by ionic polymer metal composites. IEEE/ASME Trans Mechatron, 15, 603(2010).
[113] J Barramba, J Silva, P J C Branco. Evaluation of dielectric gel coating for encapsulation of ionic polymer-metal composite (IPMC) actuators. Sens Actuators A, 140, 232(2007).
[114] I Must, T Kaasik, I Baranova et al. A power-autonomous self-rolling wheel using ionic and capacitive actuators. Proc SPIE, 9430, 94300Q(2015).
[115] B Mohammadi, A A Yousefi, S M Bellah. Effect of tensile strain rate and elongation on crystalline structure and piezoelectric properties of PVDF thin films. Polymer Testing, 26, 42(2007).
[116] G L Smith, J S Pulskamp, L M Sanchez et al. PZT-based piezoelectric MEMS technology. J Am Ceram Soc, 95, 1777(2012).
[117] S B Fuller, M Karpelson, A Censi et al. Controlling free flight of a robotic fly using an onboard vision sensor inspired by insect ocelli. J Royal Soc Interface, 11, 20140281(2014).
[118] Y Wu, J K Yim, J Liang et al. Insect-scale fast moving and ultrarobust soft robot. Sci Robot, 4, eaax1594(2019).
[119] K Y Ma, P Chirarattananon, S B Fuller et al. Controlled flight of a biologically inspired, insect-scale robot. Science, 340, 603(2013).
[120] Y Chen, N Doshi, B Goldberg et al. Controllable water surface to underwater transition through electrowetting in a hybrid terrestrial-aquatic microrobot. Nat Commun, 9, 2495(2018).
[121] N T Jafferis, E F Helbling, M Karpelson et al. Untethered flight of an insect-sized flapping-wing microscale aerial vehicle. Nature, 570, 491(2019).
[122] S Xu, Z Yan, K I Jang et al. Assembly of micro/nanomaterials into complex, three-dimensional architectures by compressive buckling. Science, 347, 154(2015).
[123] Y Zhang, Z Yan, K Nan et al. A mechanically driven form of Kirigami as a route to 3D mesostructures in micro/nanomembranes. Proceedings of the National Academy of Sciences of the United States of America, 112, 11757(2015).
[124] Y Liu, Z Yan, Q Lin et al. Guided formation of 3D helical mesostructures by mechanical buckling: analytical modeling and experimental validation. Adv Funct Mater, 26, 2909(2016).
[125] Z Yan, F Zhang, F Liu et al. Mechanical assembly of complex, 3D mesostructures from releasable multilayers of advanced materials. Sci Adv, 2, e1601014(2016).
[126] Z Fan, K C Hwang, J A Rogers et al. A double perturbation method of postbuckling analysis in 2D curved beams for assembly of 3D ribbon-shaped structures. J Mechan Phys Solids, 111, 215(2018).
[127] J Song. Mechanics of stretchable electronics. Curr Opin Solid State Mater Sci, 19, 160(2015).
[128] Y Zhang, F Zhang, Z Yan et al. Printing, folding and assembly methods for forming 3D mesostructures in advanced materials. Nat Rev Mater, 2, 17019(2017).
[129] X Guo, Z Xu, F Zhang et al. Reprogrammable 3D mesostructures through compressive buckling of thin films with prestrained shape memory polymer. Acta Mechan Solida Sinica, 31, 589(2018).
[130] K I Jang, K Li, H U Chung et al. Self-assembled three dimensional network designs for soft electronics. Nat Commun, 8, 15894(2017).
[131] B H Kim, F Liu, Y Yu et al. Mechanically guided post-assembly of 3D electronic systems. Adv Funct Mater, 28, 1803149(2018).
[132] F Liu, Y Chen, H Song et al. High performance, tunable electrically small antennas through mechanically guided 3D assembly. Small, 15, 1804055(2019).
[133] Z Yan, F Zhang, J Wang et al. Controlled mechanical buckling for origami-inspired construction of 3D microstructures in advanced materials. Adv Funct Mater, 26, 2629(2016).
[134] X Ning, H Wang, X Yu et al. 3D tunable, multiscale, and multistable vibrational micro-platforms assembled by compressive buckling. Adv Funct Mater, 27, 1605914(2017).
[135] Y Shi, F Zhang, K Nan et al. Plasticity-induced origami for assembly of three dimensional metallic structures guided by compressive buckling. Extrem Mechan Lett, 11, 105(2017).
[136] Z Yan, M Han, Y Yang et al. Deterministic assembly of 3D mesostructures in Adv Mater via compressive buckling: A short review of recent progress. Extrem Mechan Lett, 11, 96(2017).
[137] H Fu, K Nan, W Bai et al. Morphable 3D mesostructures and microelectronic devices by multistable buckling mechanics. Nat Mater, 17, 268(2018).
[138] G Luo, H Fu, X Cheng et al. Mechanics of bistable cross-shaped structures through loading-path controlled 3D assembly. J Mechan Phys Solids, 129, 261(2019).
[139] Y Liu, X Wang, Y Xu et al. Harnessing the interface mechanics of hard films and soft substrates for 3D assembly by controlled buckling. Proc Natl Academ Sci, 116, 15368(2019).
[140] J M Jani, M Leary, A Subic et al. A review of shape memory alloy research, applications and opportunities. Mater Des, 56, 1078(2014).
[141] H Ma, J Hou, X Wang et al. Flexible, all-inorganic actuators based on vanadium dioxide and carbon nanotube bimorphs. Nano Lett, 17, 421(2017).
[142] H Yu, T Ikeda. Photocontrollable liquid-crystalline actuators. Adv Mater, 23, 2149(2011).
[143] S W Kwok, S A Morin, B Mosadegh et al. Magnetic assembly of soft robots with hard components. Adv Funct Mater, 24, 2180(2014).
[144] R Pelrine, R Kornbluh, Q Pei et al. High-speed electrically actuated elastomers with strain greater than 100%. Science, 287, 836(2000).

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20