
Guiping Cao, Xingsi Liu, Nian Liu, Kecheng Yang, Min Xia. Segmentation of Subway Tunnel Wall Surface Objects Based on Laser 3D Point Cloud[J]. Acta Optica Sinica, 2020, 40(21): 2110001
- Acta Optica Sinica
- Vol. 40, Issue 21, 2110001 (2020)
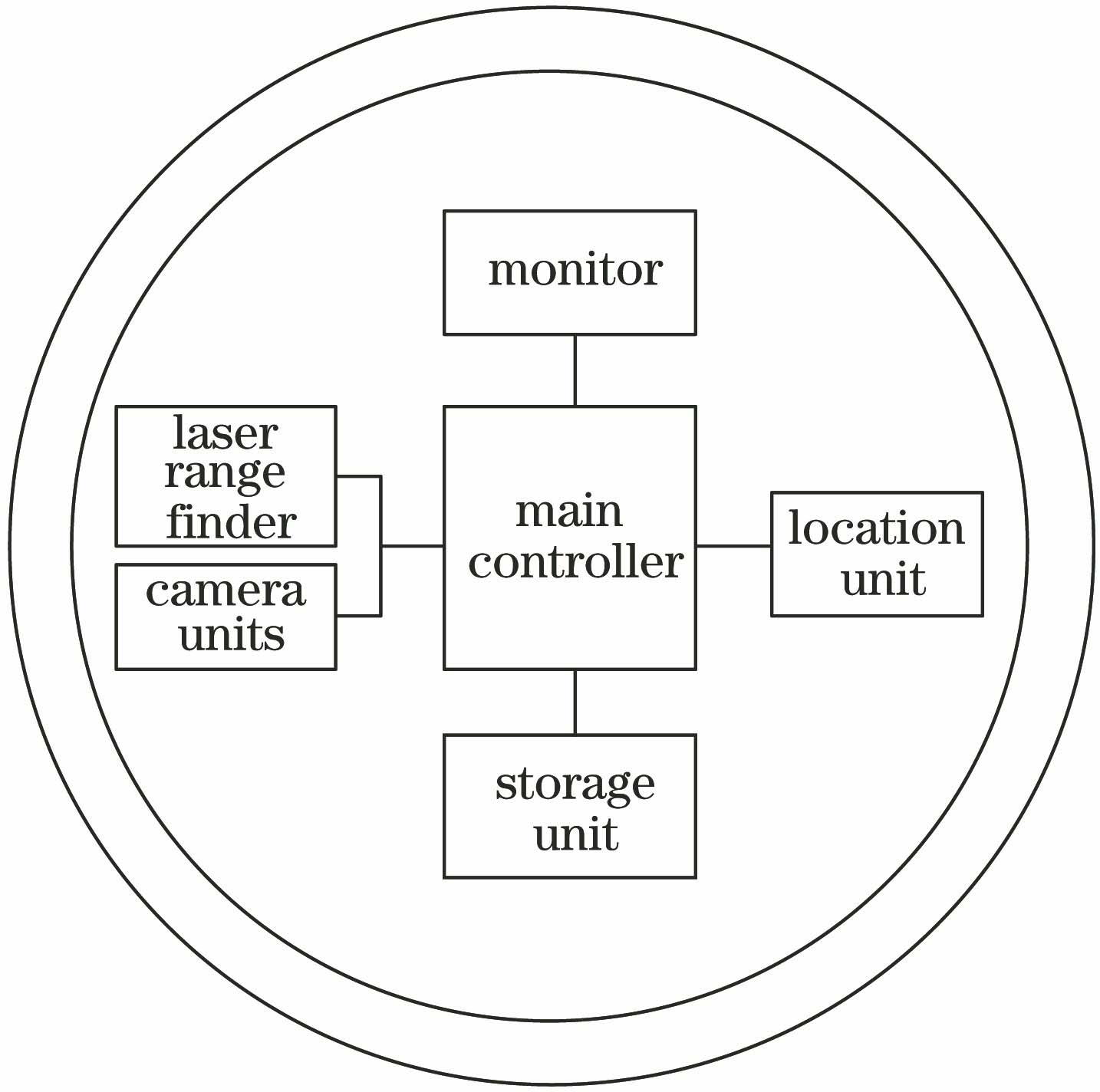
Fig. 1. System block diagram of the detection system

Fig. 2. Photo of the detection system
Fig. 3. Schematic diagram of polar coordinates
Fig. 4. A picture of a simulated tunnel
Fig. 5. Three-dimensional point cloud image of a tunnel
Fig. 6. Raw point cloud data
Fig. 7. Point cloud data after segmentation
Fig. 8. Schematic for defining concept of DBSCAN
Fig. 9. Flowchart of segmentation algorithm based on density clustering
Fig. 10. Segmentation results based on density clustering algorithm
Fig. 11. Scene 1
Fig. 12. Scene 2
Fig. 13. 3D point cloud of scene 1
Fig. 14. 3D point cloud of scene 2
Fig. 15. Result of scene 1. (a) Result of region growing segmentation; (b) result based on density clustering segmentation method
Fig. 16. Result of scene 2. (a) Result of region growing segmentation; (b) result based on density clustering segmentation method
Fig. 17. Deformation of the tunnel is simulated by object compression
Fig. 18. A deformed simulated tunnel
Fig. 19. Segmentation results of object point cloud in the deformed tunnel. (a) Result of region growing segmentation; (b) result based on density clustering segmentation method
|
Table 1. Parameters of objects for testing region growing segmentation
|
Table 2. Parameters of objects in scene 1
|
Table 3. Parameters of objects in scene 2

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20