
Xingsheng Qin, Xiaohuan Li, Xin Tang, Zhaoyu Su, Zeji Liao. Extrinsic Calibration Method of Lidar and Camera Based on Key Points of Calibration Board[J]. Laser & Optoelectronics Progress, 2022, 59(4): 0428001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 4, 0428001 (2022)

Fig. 1. Point clouds in calibration plate from MEMS Lidar single frame scanning
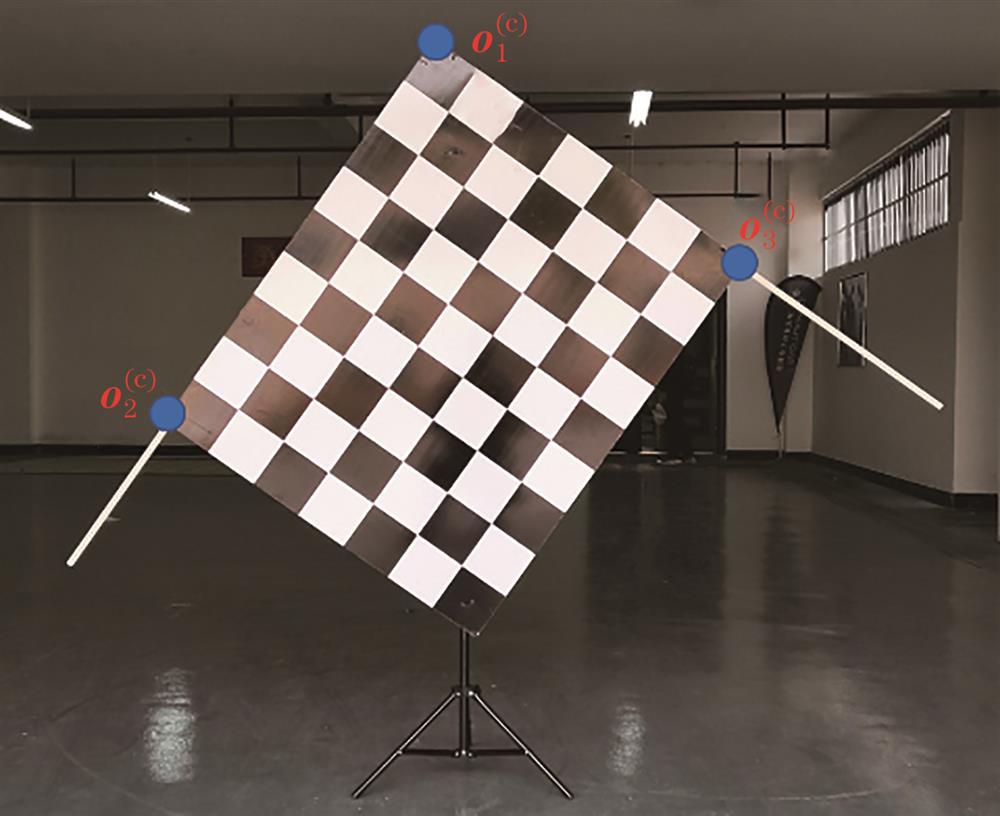
Fig. 2. Schematic diagram of calibration board image
Fig. 3. Schematic diagram of calibration plate point clouds
Fig. 4. Geometric representation of polar coordinate equation
Fig. 5. Extrinsic calibration algorithm flow based on key points on calibration board
Fig. 6. Experimental hardware connection diagram
Fig. 7. Effect drawing of adjacent edge fitting and key point extraction of calibration plate
Fig. 8. Renderings of point clouds projected onto image. (a) Key points of calibration board; (b) point and plane correspondences; (c) line and plane correspondences
|
Table 1. Parameters of RS-LiDAR-M1
|
Table 2. Parameters of Basler acA2040-25gc
|
Table 3.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20