
Zhiliang Yu, Xiaoming Jiang, Kairui Cao, Song Li, Yan Wan. Hysteresis Characteristics of Steering Mirror Driven by Piezoelectric Actuator and Its Experimental Research[J]. Acta Optica Sinica, 2018, 38(8): 0814002
- Acta Optica Sinica
- Vol. 38, Issue 8, 0814002 (2018)
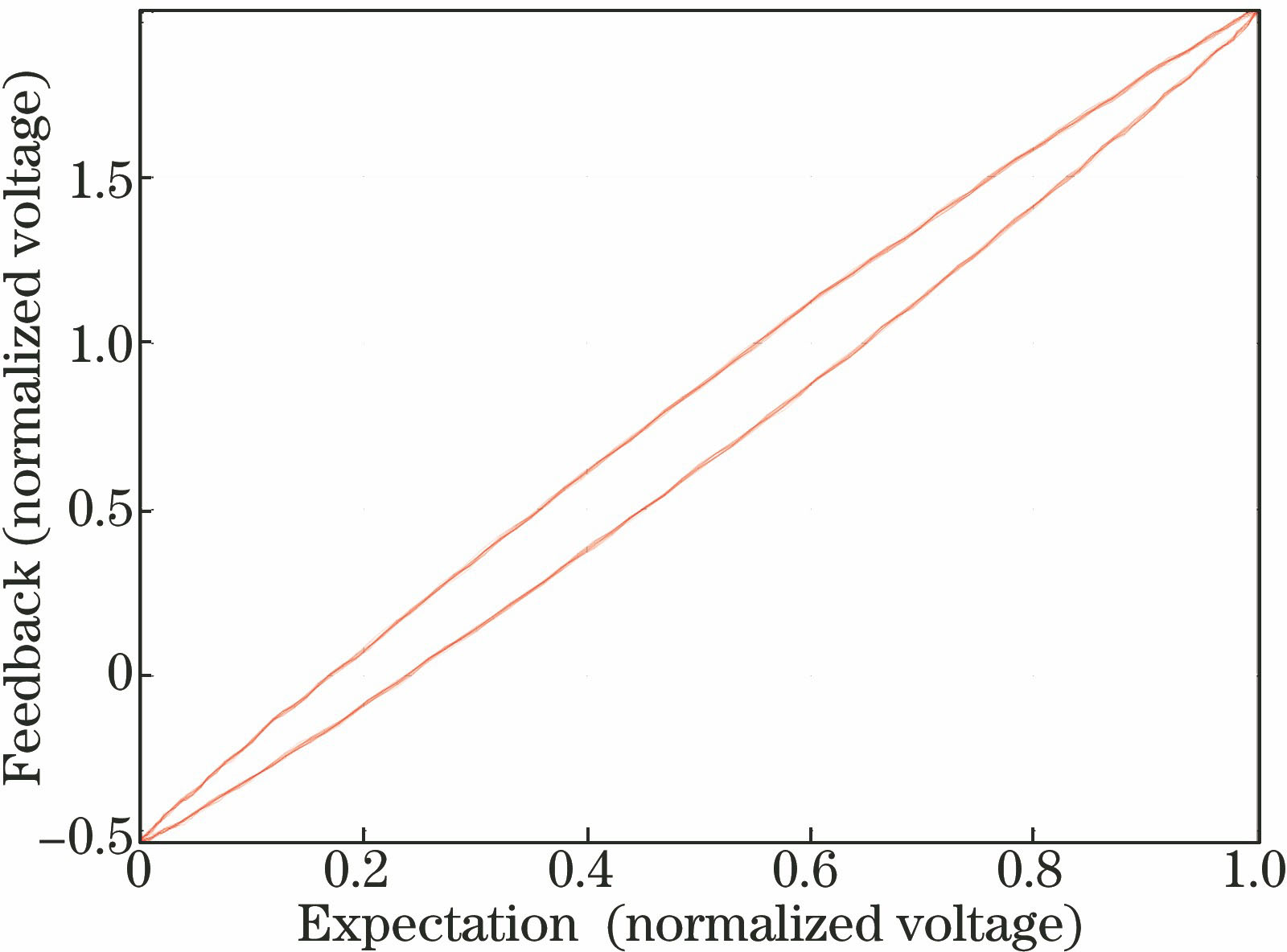
Fig. 1. Hysteresis curves
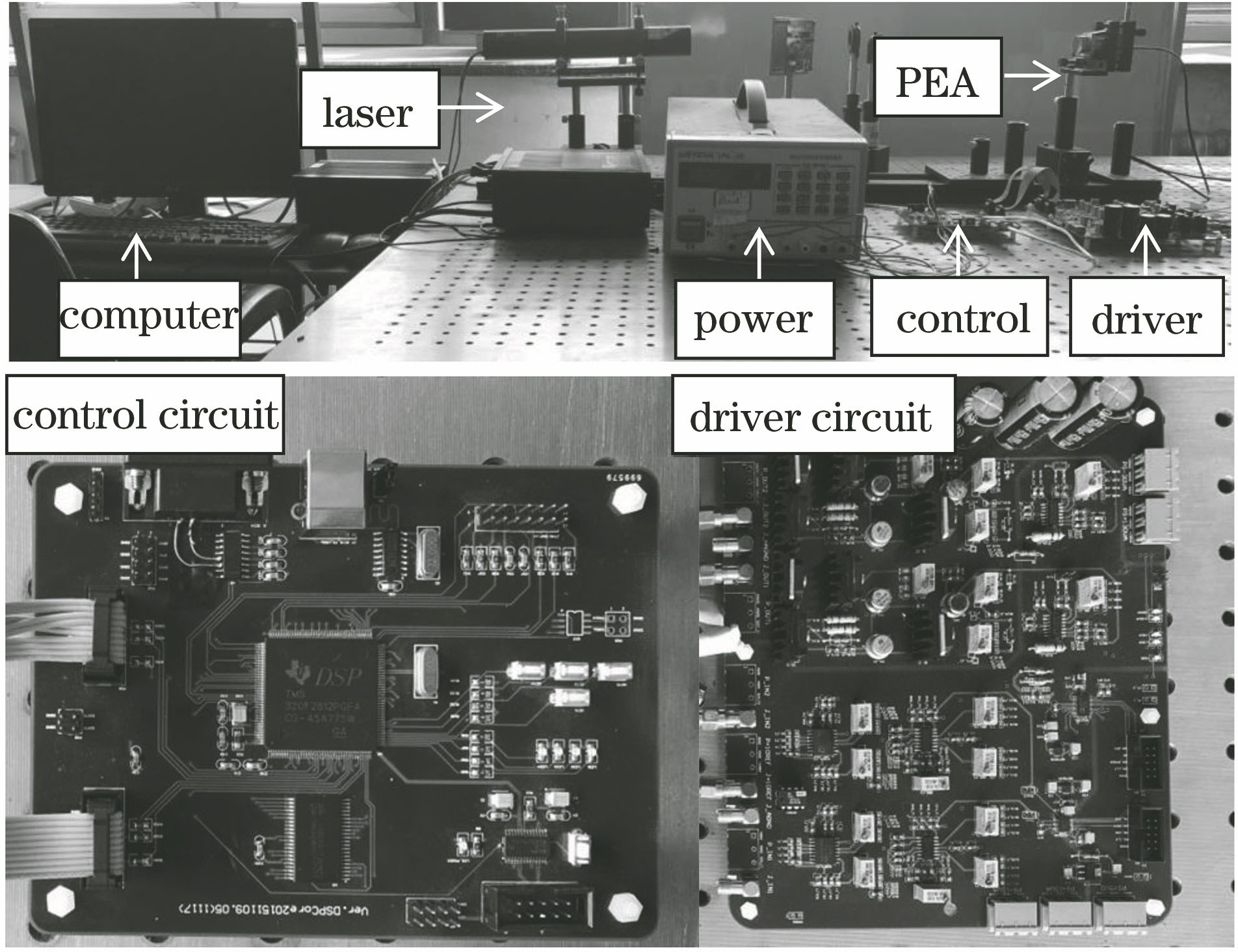
Fig. 2. PEA experiment control system
Fig. 3. System validation
Fig. 4. 100 Hz verification curve with the constant amplitude. (a) Physical system output (blue) and simulation model output (green); (b) output error of physical system and simulation model
Fig. 5. 100 Hz verification curve with decreasing amplitude. (a) Physical system output (blue) and simulation model output (green); (b) output error of physical system and simulation model
Fig. 6. Feedforward compensation
Fig. 7. Verification curve with 50 Hz sine input and the constant amplitude. (a) Before and after compensation curves; (b) linear error before compensation; (c) linear error after compensation
Fig. 8. Error of compound control method and no feedback control method under 10 Hz sine signal
|
Table 1. Test linearity by sine input signal with different frequencies
|
Table 2. Mean square error of feedback control and compound control with different frequencies

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20