
Gongbing Su, Chao Li, Tianxiang Liu, Chun Fang. Processing Trajectory Planning of Space Curved Robot Based on Vision[J]. Laser & Optoelectronics Progress, 2020, 57(10): 101503
- Laser & Optoelectronics Progress
- Vol. 57, Issue 10, 101503 (2020)
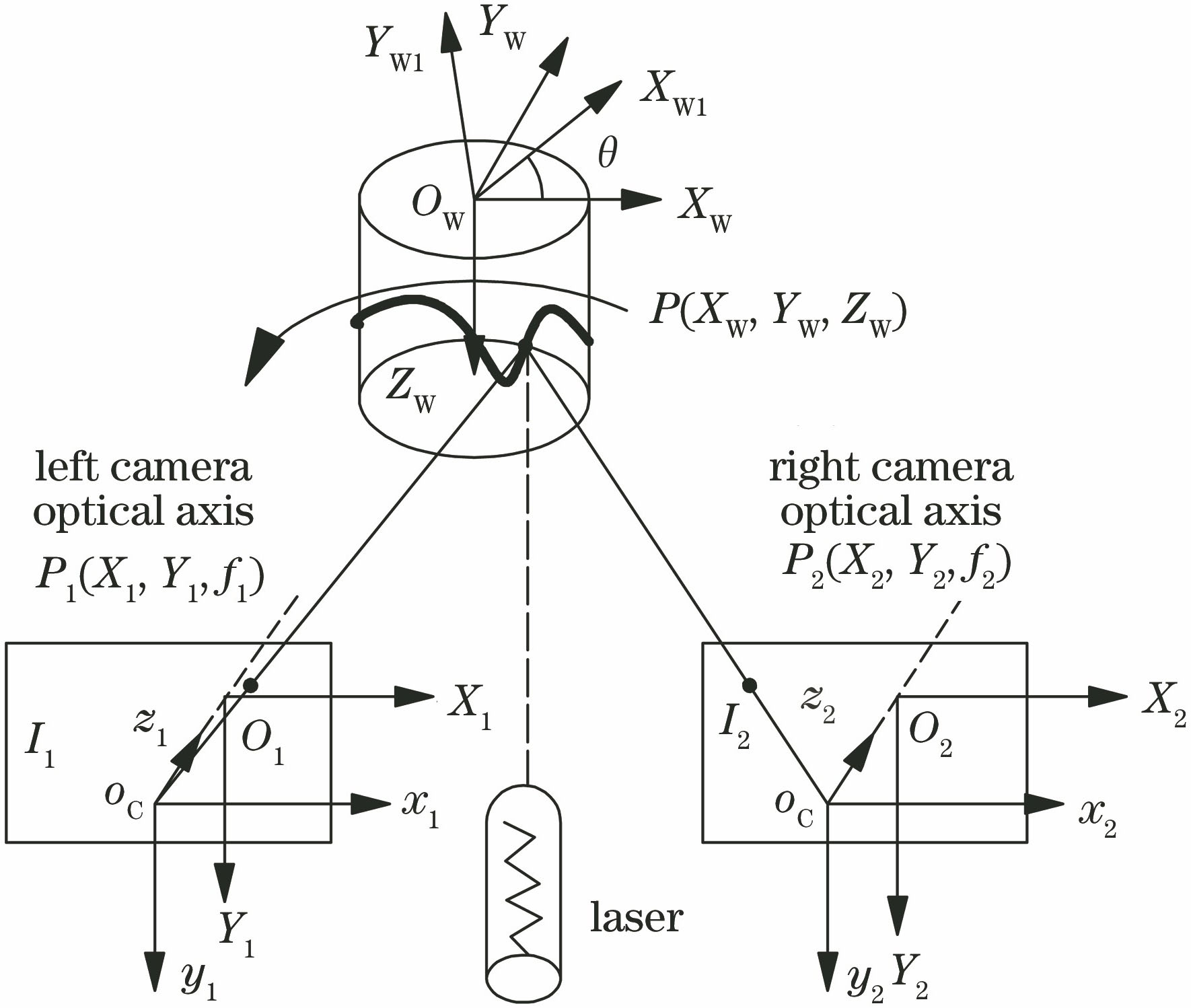
Fig. 1. Schematic diagram of panoramic vision reconstruction of binocular camera
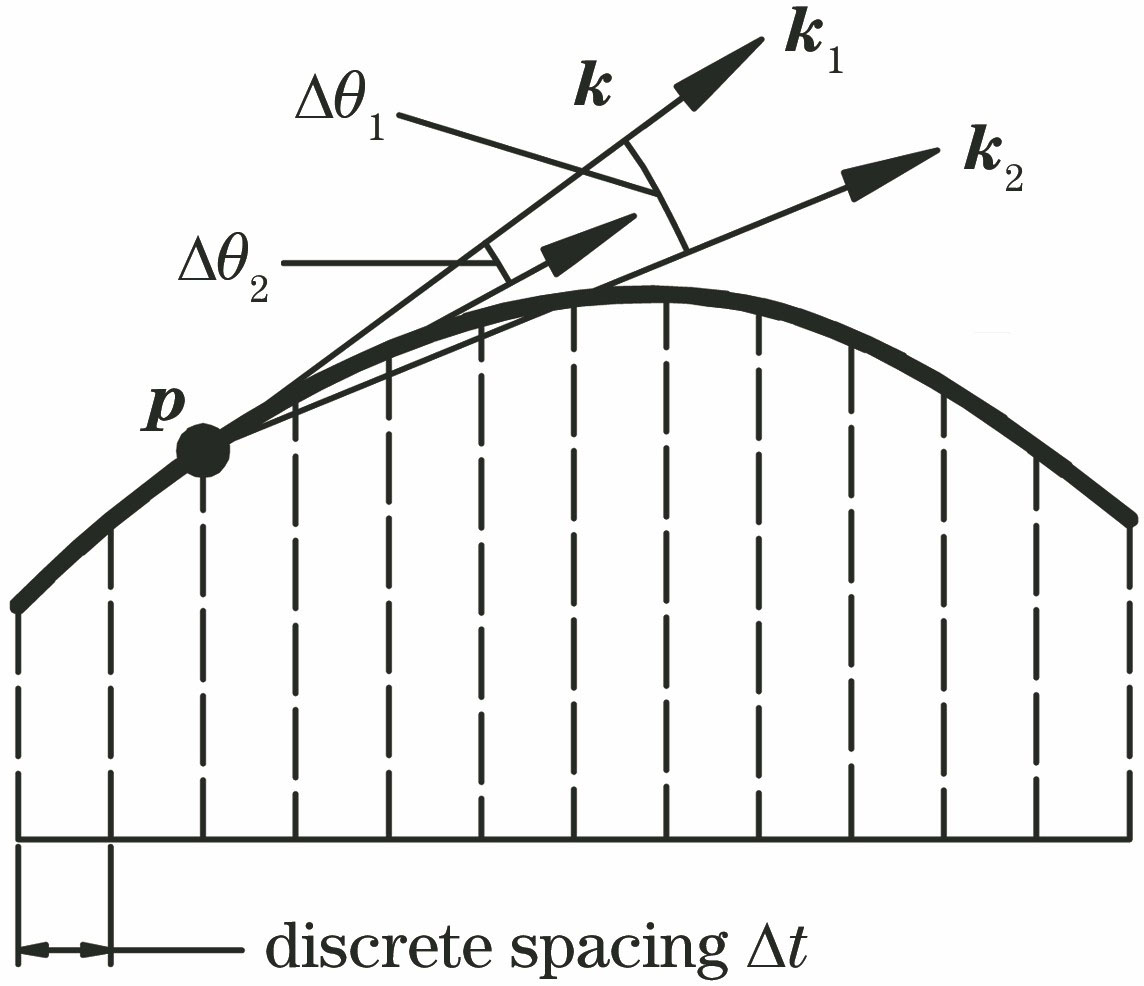
Fig. 2. Schematic of discrete difference
Fig. 3. Principle of Z axis projection
Fig. 4. Transformation principle of robot hand-eye system
Fig. 5. Flow chart of program
Fig. 6. Diagram of measurement system with dual cameras
Fig. 7. 3D reconstructed trajectory of target
Fig. 8. Fitting track of target point
Fig. 9. Number of poses corresponding to the curve segment
Fig. 10. Attitude comparison of different algorithms. (a) Debord recursive algorithm; (b) discrete difference projection algorithm
Fig. 11. Curve of the joint angle of robot
Fig. 12. Comparison of simulation and actual trajectory
|
Table 1. World coordinate of laser target trajectoryunit: mm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20