
Lu Xu, Xu Yang, Long Wu, Xiaoan Bao, Yijia Zhang. Restrain range walk error of Gm-APD lidar to acquire high-precision 3D image[J]. Infrared and Laser Engineering, 2020, 49(10): 20200218
- Infrared and Laser Engineering
- Vol. 49, Issue 10, 20200218 (2020)
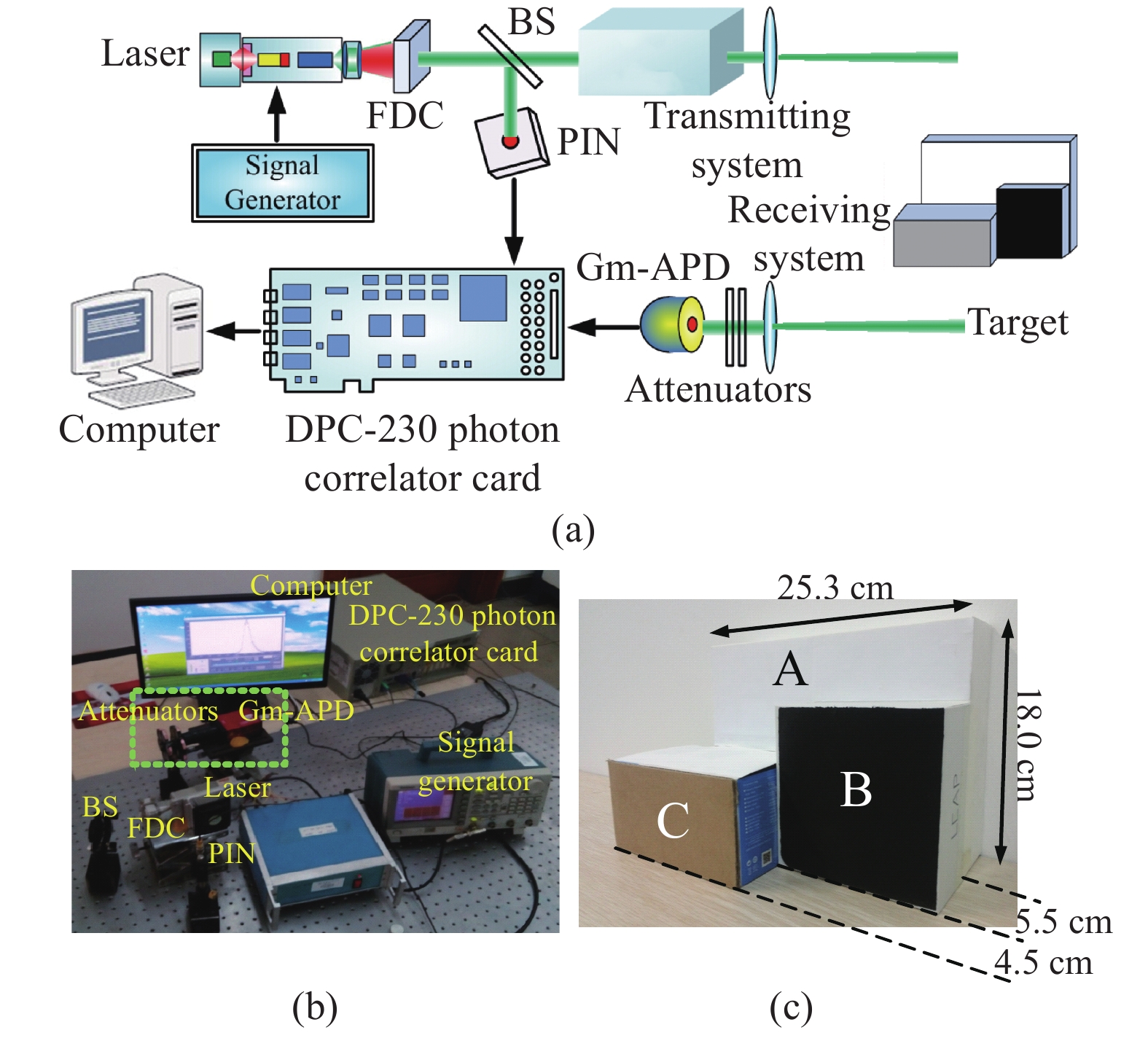
Fig. 1. Gm-APD lidar system. (a) Schematic of the Gm-APD lidar (FDC: frequency doubling crystal, BS: beam splitter, PIN: high speed PIN detector, Gm-APD: Gm-APD detector module); (b) Photograph of the lidar system; (c) Photograph of the target
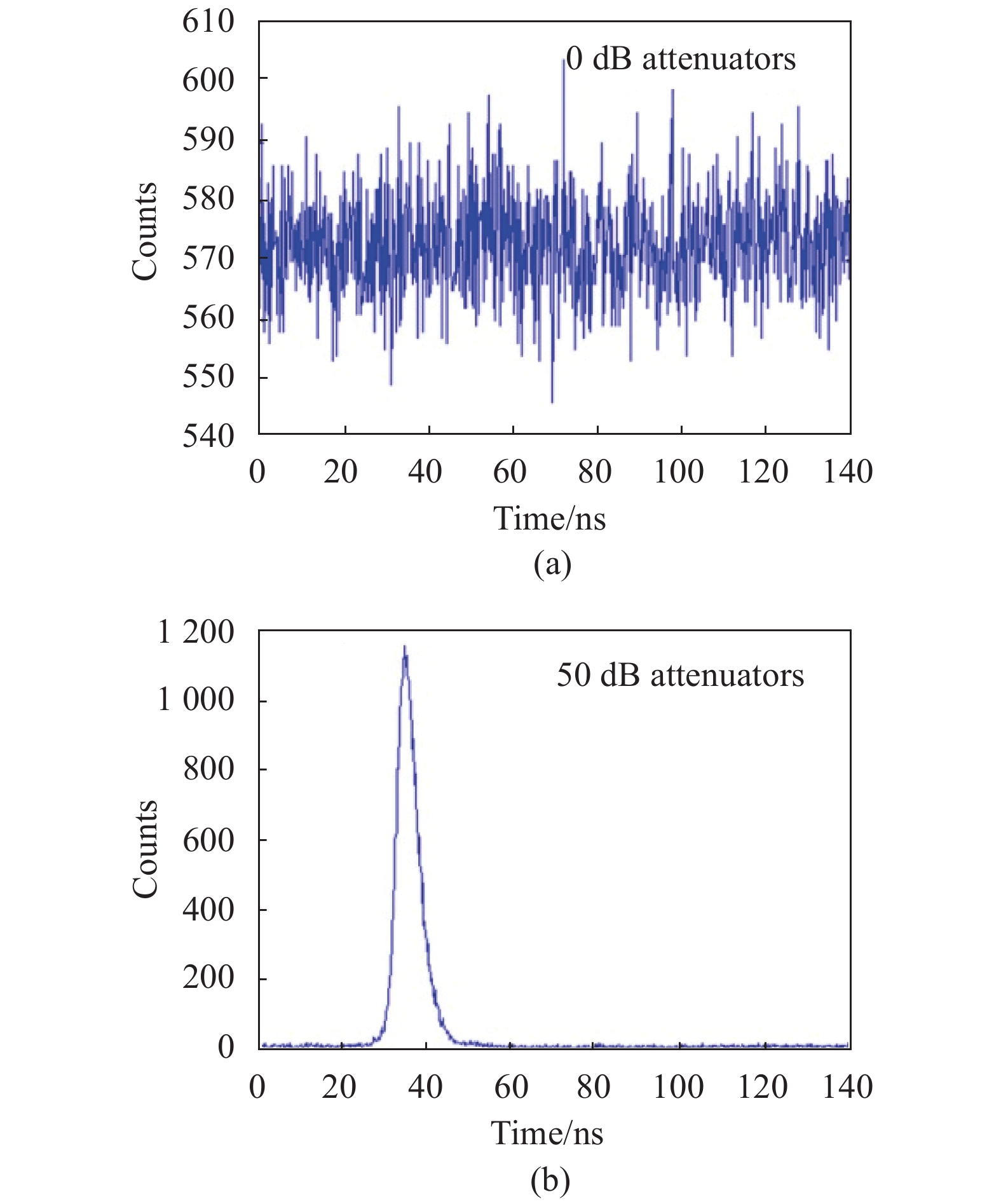
Fig. 2. PCDH of target A with different attenuators. (a) 0 dB attenuators; (b) 50 dB attenuators
Fig. 3. Logical diagram of the two methods to restrain range walk error
Fig. 4. Experimental imaging results of Gaussian functions fitting method. (a) Depth image with a color map corresponding to the distance using the traditional pulse peak ranging method. (b) 3D plot of depth image with a color map corresponding to the intensity using the signal restoration & Gaussian functions fitting method. (c) Distance distribution histogram of Fig. 3(a) . (d) Distance distribution histogram of Fig. 3(b)
Fig. 5. Experimental imaging results of center-of-mass algorithm method. (a) Depth image with a color map corresponding to the distance using the traditional center-of-mass algorithm method. (b) 3D plot of depth image with a color map corresponding to the intensity using the signal restoration & center-of-mass algorithm method. (c) Distance distribution histogram of Fig. 4(a) . (d) Distance distribution histogram of Fig. 4(b)
|
Table 1. Performance parameters of the devices in the experiment


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20