
Hongxia Cui, Lijun Chen, Ning Wang, Tingting Li. Calibration Method with Implicit Constraints for Multi-View Combined Camera Using Automatic Coding of Marker Points[J]. Chinese Journal of Lasers, 2020, 47(1): 0110003
- Chinese Journal of Lasers
- Vol. 47, Issue 1, 0110003 (2020)
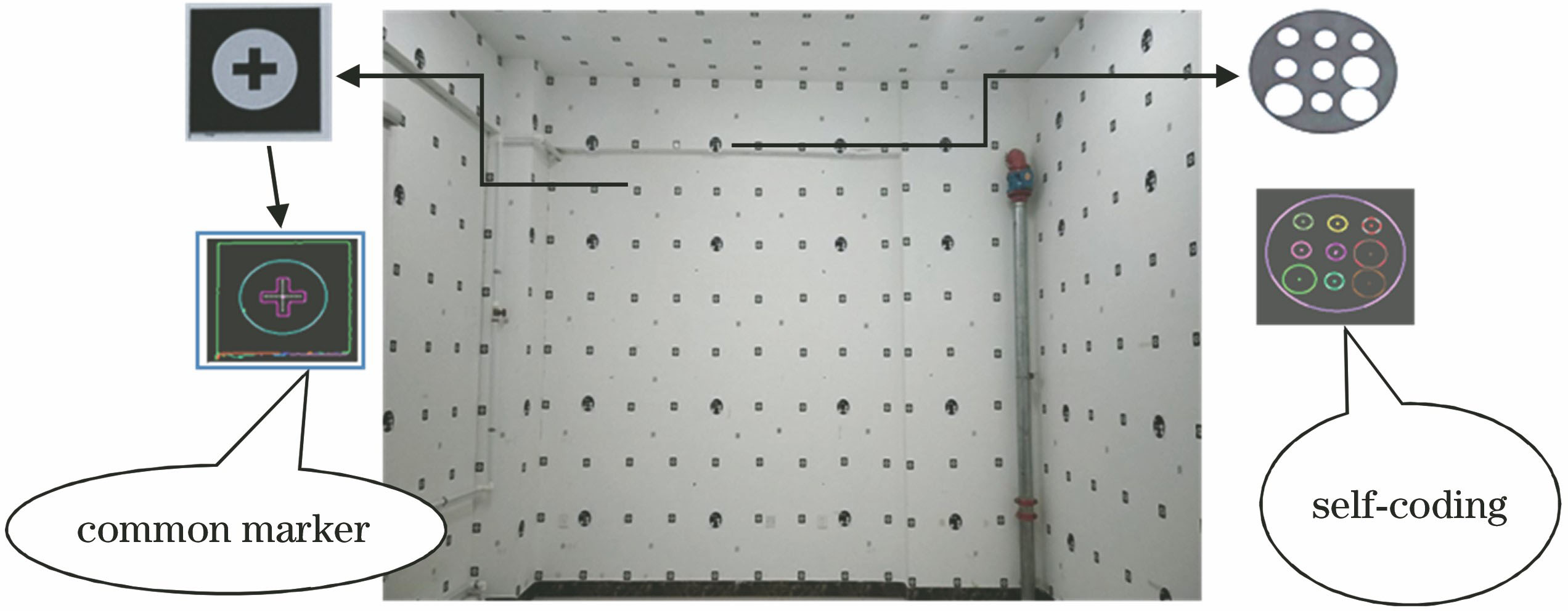
Fig. 1. Target calibration field and self-coding marker
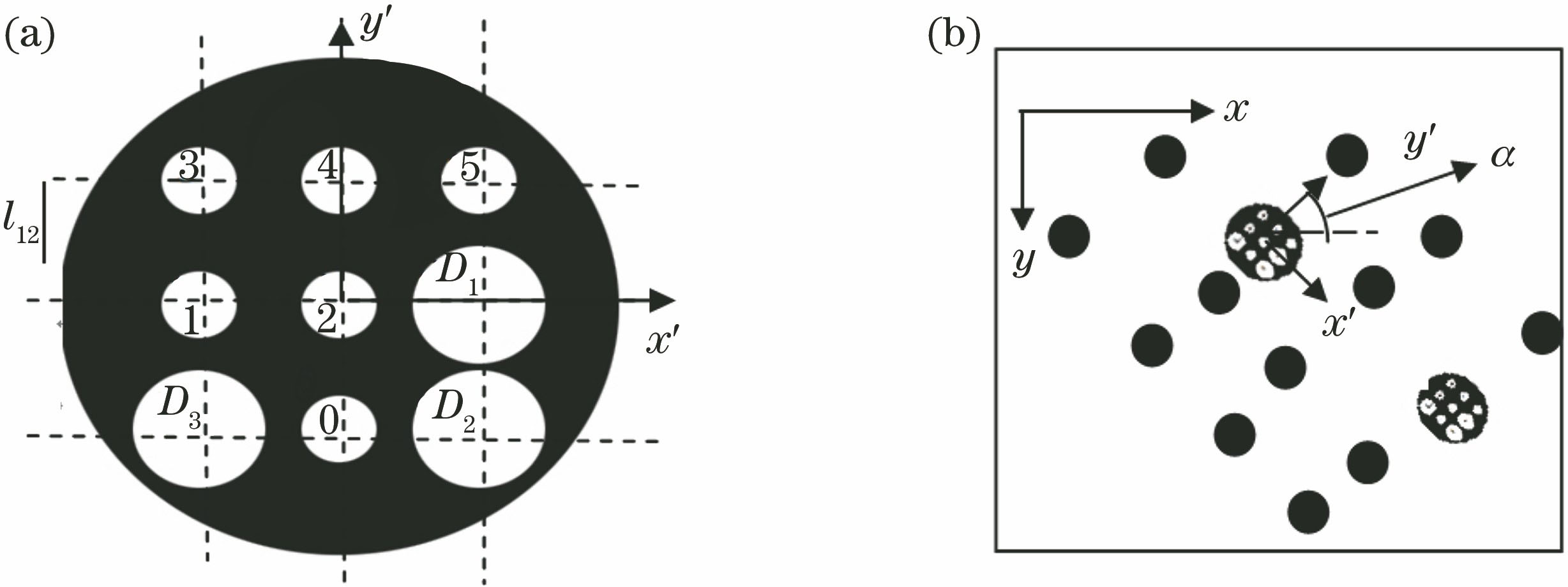
Fig. 2. Automatic coding of marker. (a) Automatic coding of internal code for self-coding marker; (b) automatic coding of external code in target calibration field
Fig. 3. Geometrical structure of combined camera
Fig. 4. Automatic coding of markers
Fig. 5. Relative orientation elements among cameras. (a) Relative position elements for cameras 1 and 2; (b) relative position elements for cameras 2 and 3; (c) relative position elements for cameras 3 and 4; (d) relative linear elements for cameras 4 and 5; (e) relative angular elements for cameras 1 and 2; (f) relative angular elements for cameras 2 and 3; (g) relative angular elements for cameras 3 and 4; (h) relative angular elements for cameras 4 and 5
|
Table 1. Internal and external codes for coding markers
|
Table 2. Calculation of rotation angle α
|
Table 3. Root-mean-square error of checking points by method A
|
Table 4. Root-mean-square error of checking points by method B

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20