
Ting Yu, Jun Yang. Point Cloud Model Recognition and Classification Based on K-Nearest Neighbor Convolutional Neural Network[J]. Laser & Optoelectronics Progress, 2020, 57(10): 101510
- Laser & Optoelectronics Progress
- Vol. 57, Issue 10, 101510 (2020)
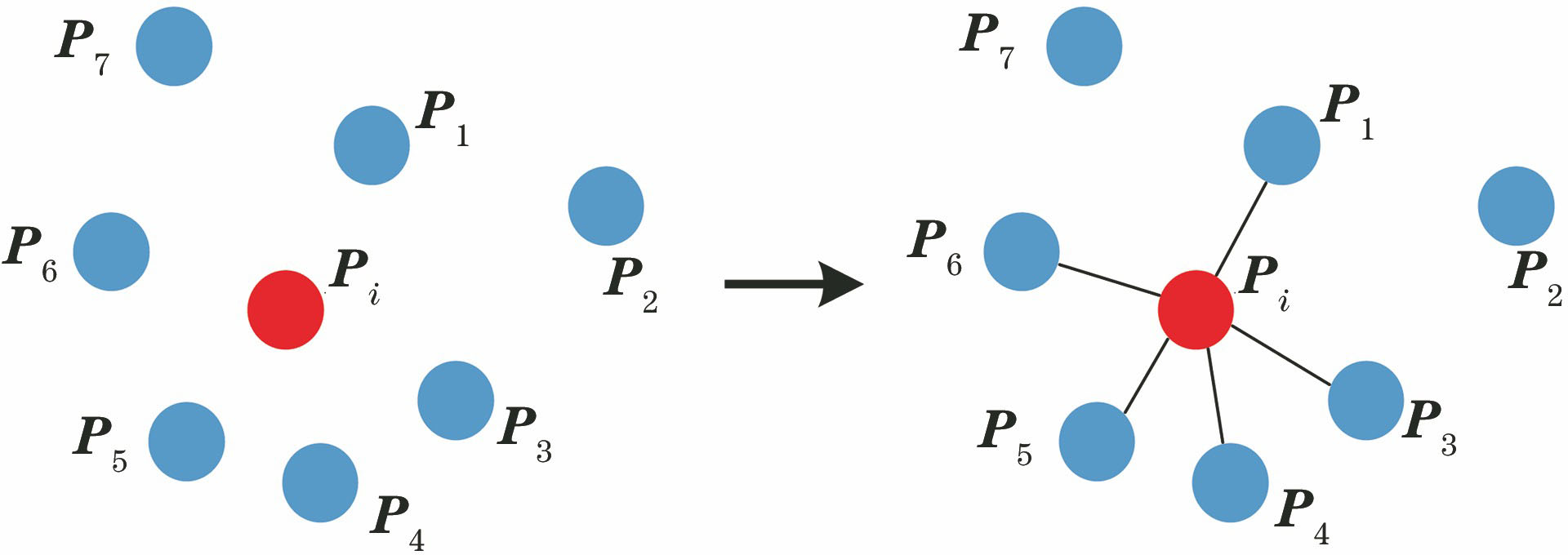
Fig. 1. Construction process of the local neighborhood
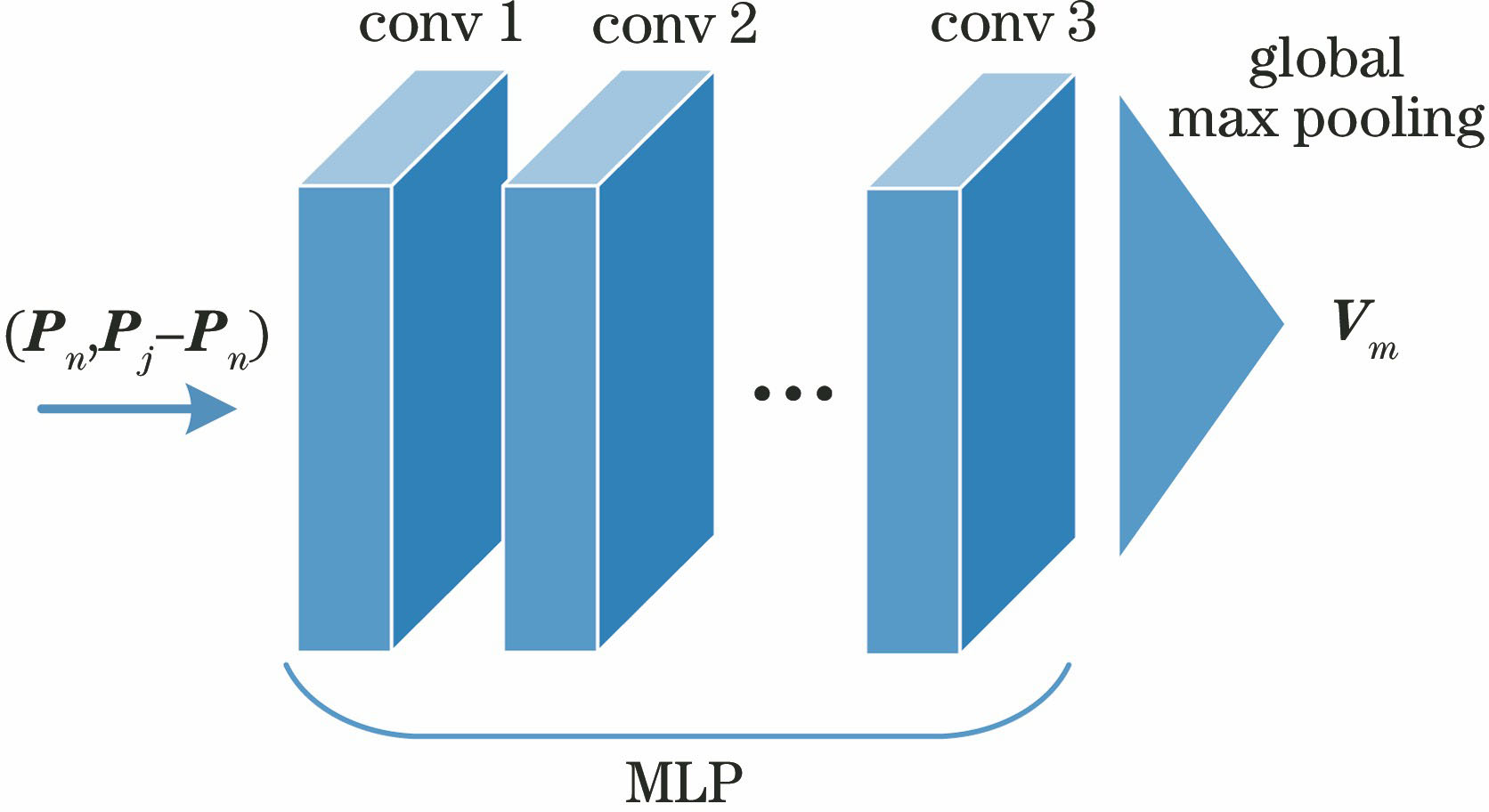
Fig. 2. Schematic diagram of feature extraction process
Fig. 3. JANet model
Fig. 4. KNN-CNN model
Fig. 5. Graph of activation function
Fig. 6. Three representations of three-dimensional models. (a) Rendered model; (b) mesh model; (c) 3D point cloud model
Fig. 7. Examples of misclassified point cloud models. (a) Television stand; (b) chair; (c) plant; (d) flower pot
|
Table 1. Recognition accuracy of different algorithms on ModelNet40 dataset
|
Table 2. Comparison of recognition accuracy of each category model in ModelNet40 test setunit:%
|
Table 3. Effect of k value on OA
|
Table 4. Recognition accuracy of different optimization schemesunit:%

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20