
Lin Li, Huaiyu Wu, Tianyu Zhang. Constructing Semantic Map of Mobile Robots Based on Improved DeepLab V3+[J]. Laser & Optoelectronics Progress, 2022, 59(10): 1015002
- Laser & Optoelectronics Progress
- Vol. 59, Issue 10, 1015002 (2022)
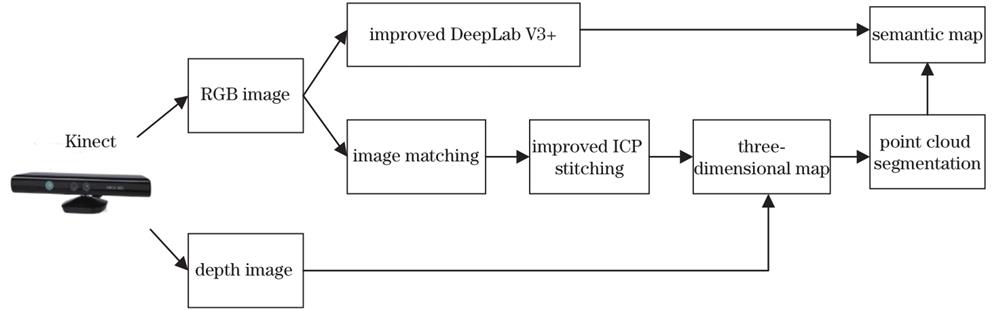
Fig. 1. Proposed framework
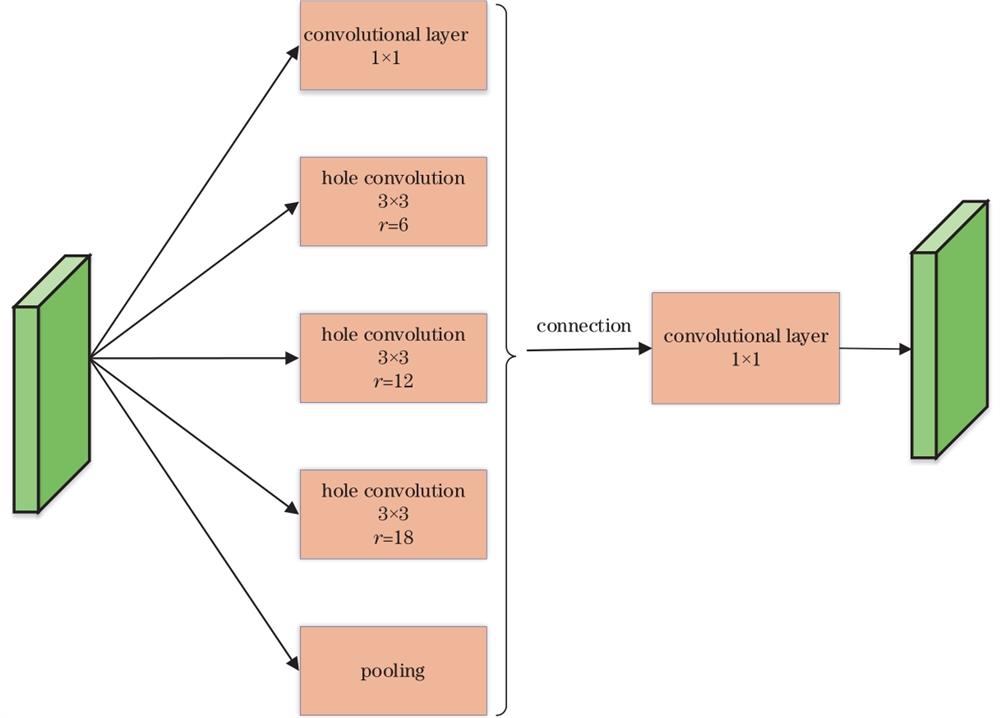
Fig. 2. ASPP module in DeepLab V3+
Fig. 3. Standard convolution decomposition
Fig. 4. Schematic of corner extraction
Fig. 5. Violence matching result
Fig. 6. Feature matching results after screening
Fig. 7. Algorithm training overall loss curve
Fig. 8. Comparison of segmentation results between DeepLab V3+ and improved DeepLab V3+. (a) Input images; (b) ground truth; (c) segmentation results of DeepLab V3+; (d) segmentation results of improved DeepLab V3+
Fig. 9. 3D point cloud maps. (a) Perspective 1; (b) perspective 2
Fig. 10. 3D point cloud after segmentation. (a) Perspective 1; (b) perspective 2
Fig. 11. Semantic maps. (a) Perspective 1; (b) perspective 2
Fig. 12. Semantic segmentation results of improved DeepLab V3+. (a) Scene Ⅰ; (b) scene Ⅱ; (c) semantic segmentation result under scene I; (d) semantic segmentation result under scene Ⅱ
Fig. 13. Semantic maps from different perspectives. (a) 3D map; (b) semantic map from perspective 1; (c) semantic map from perspective 2; (d) semantic map from perspective 3
|
Table 1. Network parameter selection
|
Table 2. Algorithm evaluation index comparison
| ||||||||||||||||||||||||||||
Table 3. RMSE of relative trajectory
| |||||||||||||||||||
Table 4. Speed of motion estimation and number of iterations
|
Table 5. Comparison of map construction performance of different methods
|
Table 6. Segmentation performance under different scenes

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20