
Cuijun Zhang, Yuhe Zhang. Research on SLAM Loop Closure Detection Method Based on HHO Algorithm[J]. Laser & Optoelectronics Progress, 2021, 58(12): 1215006
- Laser & Optoelectronics Progress
- Vol. 58, Issue 12, 1215006 (2021)

Fig. 1. Contrast charts of feature point detection of improved FAST algorithm. (a) δ=0.1; (b) δ=0.2; (c) δ=0.3; (d) δ=0.4; (e) δ=0.5
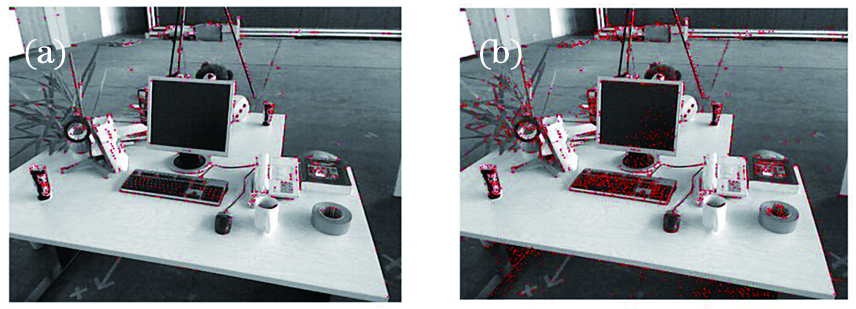
Fig. 2. Comparison of feature extraction effect before and after FAST algorithm improvement.(a) Before improvement; (b) after improvement
Fig. 3. Comparison of detection results before and after FAST algorithm improvement when image brightness is reduced by 50%. (a) Before improvement; (b) after improvement
Fig. 4. Comparison of detection results before and after FAST algorithm improvement when image brightness is doubled. (a) Before improvement; (b) after improvement
Fig. 5. Feature extraction comparison of the original algorithm. (a) Original image; (b) brightness is reduced by 50%; (c) brightness is doubled
Fig. 6. Feature extraction comparison of the improved FAST algorithm. (a) Original image; (b) brightness is reduced by 50%; (c) brightness is doubled
Fig. 7. Steps of loop closure detection method based on HHO algorithm
Fig. 8. P-R curves of three loop closure detection methods. (a) On KITTI dataset; (b) on freiburg2_desk dataset
Fig. 9. Fitness change curves on freiburg2_desk dataset. (a) Current frame number is 183; (b) current frame number is 2839
Fig. 10. Fitness change curves on KITTI dataset. (a) Current frame number is 625; (b) current frame number is 3633
Fig. 11. Time comparison of three loop closure detection methods on freiburg2_desk dataset. (a) Current frame number is 183; (b) current frame number is 2839
Fig. 12. Time comparison of three loop closure detection methods on KITTI dataset. (a) Current frame number is 625; (b) current frame number is 3633
|
Table 1. Four different location update strategies in the exploitation phase
| |||||||||||||||||
Table 2. Number of feature points detected by improved FAST algorithm when setting different δ


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20