
Qin-Qin WU, Xi-Cai LI, Yuan-Qing WANG, Shu-Ping REN. Human localization technology based on the pyroelectric infrared sensors[J]. Journal of Infrared and Millimeter Waves, 2020, 39(2): 228
- Journal of Infrared and Millimeter Waves
- Vol. 39, Issue 2, 228 (2020)
Abstract
Introduction
Human tracking and localization technology is one of most significant topic for the security [
Pyroelectric infrared sensors (PIR) [
In this paper, a FOV modulation strategy is proposed, and the human localization node based on the proposed strategy is fabricated. The proposed FOVs modulation strategy can improve the human localization resolution without reduction of the detection distance of the PIR. Owing to larger angle of modulated FOV and smaller angle of sampling area (SA), the modulation strategy can achieve larger theoretical detection distance and higher angle resolution compare with the strategies which are reported in [
1 The principle of human localization by use of PIR
PIR is a frequently-used human body detection device. It is sensitive to 8~14 µm infrared light. The Fresnel lens can enhance the detection distance of PIR. If a human walks in the FOV of the PIR, the PIR will be triggered and output analog signal. Process the signal to determine the state of the PIR. Use the ‘0’ and ‘1’ (two states) to represent the PIRs are triggered or not [
![]()
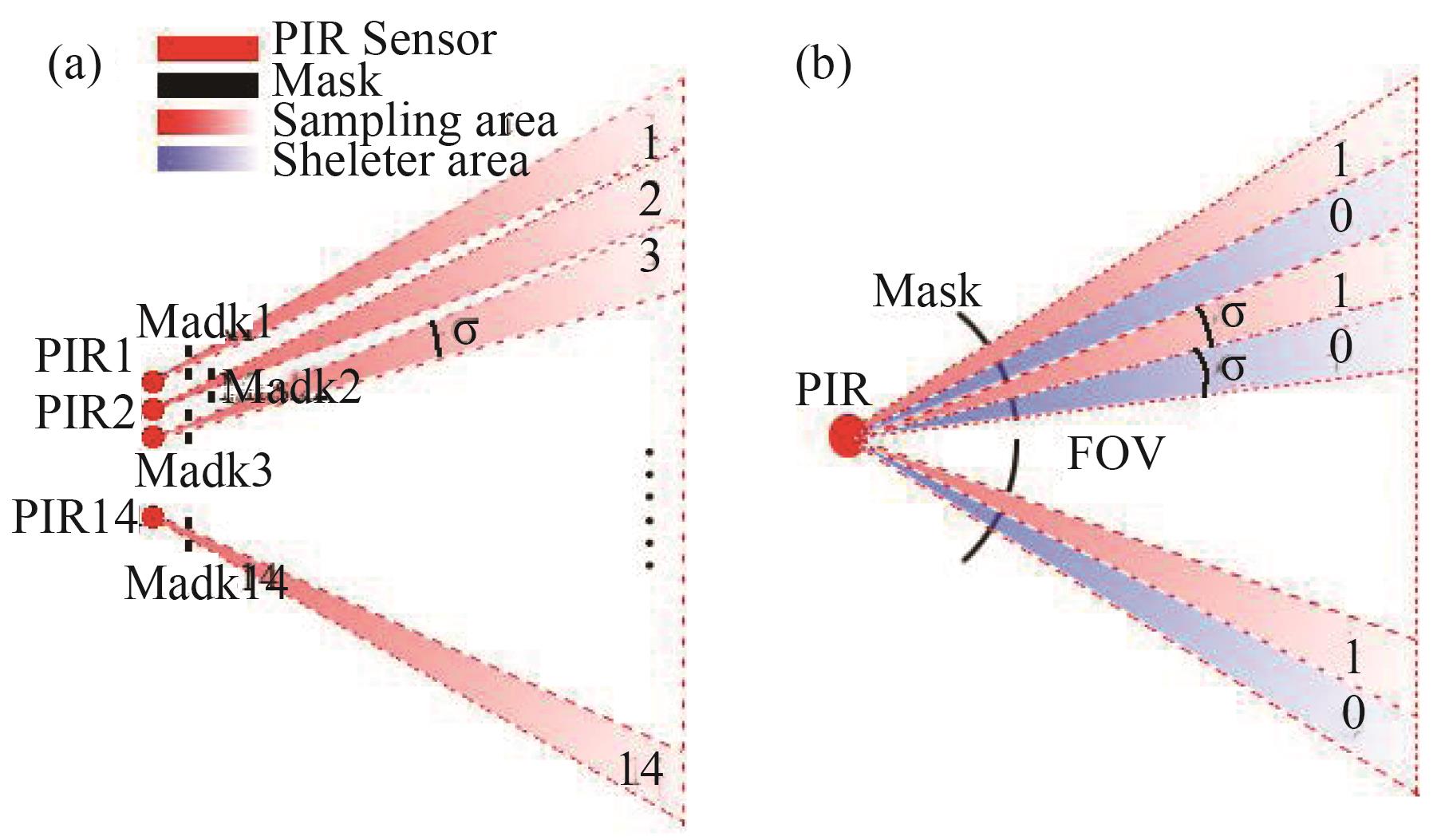
Figure 1.The sketch map of the modulation strategy of Ref.12 and Refs.13-14 (a) The modulation strategy of Ref.12,(b) the modulation strategy of Refs.13-14
As shown in
![]()
Figure 2.The sketch map of the proposed FOVs modulation strategy (a) the FOV of one PIR is modulated by a mask, (b) ideally, the starting points of the FOVs of multiple PIRs are located at same point (
As shown in
Set the angle of the detection area of the node which includes K PIRs to be ψ, as shown in
where L is the total number of SAs. And for the proposed strategy,ψ also can be described as Eq. 2:
The relationship between K and L can be described as Eq. 3:
Substitute the Eq. 2 and Eq. 3 into Eq. 1, the σ=γ/K can be obtained. For the proposed modulation strategy, the angle resolution σ is related to γ and K. If the γ is given, we can increase the K to improve the angle resolution, and the γ doesn’t need to be reduced. In order to verify the proposed modulation strategy, the human localization node which include nine PIRs is fabricated, as shown in
![]()
Figure 3.The physical map of the node, and the sketch map of the sampling areas in non-ideal case (a) The arrangement of PIRs, (b) the physical map of whole node, (c) the sketch map of the sampling areas of the node in non-ideal case
For the node, the PIRs (KP500B, Nisaila. The parameters of the KP500B can be seen in
| Item | Parameters |
|---|---|
| Pass Band | 5 |
| Transmittance of the filter | >75% |
| Sensitivity | 3 300 V/W |
| Detectivity | 1.5×108 cm∙Hz1/2∙W-1 |
| Noise | <200 mV (mVp-p, 25℃) |
Table 1. The parameters of the KP500B
When human walks into different sampling area, the different combination of ‘0’ and ‘1’ sequence can be got. Thus, the ‘0’ and ‘1’ sequence can indicate which SA the human located in. The codes of SAs are list in
| SA | The state of PIR | Sequence | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ||
| 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 100000000 |
| 2 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 110000000 |
| 3 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 111000000 |
| …… | …… | …… | ||||||||
| 15 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 000000111 |
| 16 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 000000011 |
| 17 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 000000001 |
Table 2. The codes scheme of the 17-SAs.
If the human located in a SA, we can think that the SA is ‘triggered’. Assume a human located in Sl, and only the Sl is ‘triggered’. We can assume that the human is moving at the angular bisector line Al of the Sl. Such as the point P which is locate at Al, as shown in
It should be noted that there is no case that multiple SAs are triggered simultaneously for the proposed modulation strategy. However, the human body may cover multiple SAs or the human body only covers one SA, and he (she) makes minor motion. In these case, the multiple SAs can take turn to be triggered. Assume these SAs are Sl, Sl+1, ……, Sl+m, we can think that the human is located at the angular bisector line of the area which consists of Sl, Sl+1, ……, Sl+m. The θ can be described in Eq.5:
In order to further verify the proposed modulation strategy. We use the node to localize the human position. At least two nodes are required for localization. Assume that there are two nodes are set in a square area (600 cm×600 cm), as shown in
![]()
Figure 4.Two nodes are used for human localization.
Name the ‘triggered’ SAs Sil(i=1, 2). The i is the index of nodes. The angle between angular bisector Ail and X axis is named θil. It should be noticed that, the θ1l and θ2l are equal to θ and θ–π/2 respectively, the θ can be calculated by using the Eq. 4 or Eq. 5. According to
| The Angular Bisector | xil (cm) | yil (cm) |
|---|---|---|
| A11, A12, A1(10), A1(11) | 300+3.4 | 0 |
| A13, A1(12) | 300+1.7 | 0 |
| A14, A15, A1(9), A1(13), A1(14) | 300 | 0 |
| A16, A1(15) | 300-1.7 | 0 |
| A17, A18, A1(16), A1(17) | 300-3.4 | 0 |
| A21, A22, A2(10), A2(11) | 0 | 300-3.4 |
| A23, A2(12) | 0 | 300-1.7 |
| A24, A25, A29, A2(13), A2(14) | 0 | 300 |
| A26, A2(15) | 0 | 300+1.7 |
| A27, A28, A2(16), A2(17) | 0 | 300+3.4 |
Table 3. The intersection (xil,yil) of the angular bisector Ail and X axis or Y axis.
The slopes of the angular bisector Ail are name kil (if the kil is exist), and they can be described in Eq. 6.
And the expressions of the angular bisectors of the ‘triggered’ SAs can be described in Eq. 7:
where the (xest , yest) is the estimated human position. Substituting the i=1 and i=2 into the Eq. 7. Then the Eq. 8 can be got.
The Eq. 8 in matrix form can be described in Eq. 9
where
The human position P can be calculated by Eq. 10:
Substituting the values of kil and the corresponding (xil , yil) which are listed in
2 The estimation error analysis
The errors result from the hypothesis that the human is located at the angular bisector of the ‘triggered’ SA. The estimation human position is (xest , yest). Assuming the errors of xest, yest are Δx, Δy respectively. Thus, the real coordinate of the human position (x , y) can be described in Eq. 11:
Substituting the Eq. 11 into the Eq. 8, the Eq. 12 can be got.
Set the Δ
where the
The least square estimation for error can be described in Eq. (14):
And if the k1l does not exists, the x1l=300. Thus, the Δx=0, Δy=y-y2l+k2lx2l-k2lx, and it can be simplified to Δy = y- y2l-k2lx.
According to the formulas mentioned above, the localization error of two nodes human localization equipment can be calculated by using the numerical simulation. The error is shown in
![]()
Figure 5.The error analysis of the two nodes human localization equipment (a) Plane diagram of error analysis, (b) 3D diagram of error analysis.
It can be seen from
3 Experiment and discussion
In order to verify the proposed FOVs modulation strategy and the node, the human position localization experiments have been done. According to the setup which is shown in
![]()
Figure 6.The PIR states determined processes (a) the original signal, (b) denoise the signal by using wavelet soft threshold noise reduction method, (c) calculate the absolute values of the signal, (d) smoothing the signal, (e) set a threshold. If the amplitude of the signal larger than the threshold, set the amplitude to ‘1’, else to ‘0’, (f) further optimize the signal to determine the state of the PIR.
The original signal of a PIR is shown in
| No. | Node-1 | Node-2 | Real /cm | Estimation/cm | Error/cm |
|---|---|---|---|---|---|
| r1 | S12~S11 | S6~S8 | (250,270) | (254.6,266.6) | 8.09 |
| r2 | S10~S9 | S8~S9 | (290,290) | (293.2,293.2) | 4.47 |
| r3 | S8~S7 | S9~S10 | (325,310) | (329.0,308.1) | 4.42 |
| r4 | S7~S6 | S10~S11 | (365,335) | (355.5,334.0) | 9.57 |
| r5 | S6~S5 | S11~S12 | (400,370) | (392.0,364.9) | 9.44 |
| r6 | S5~S4 | S12~S13 | (425,400) | (432.5,407.8) | 10.86 |
| r7 | S5~S4 | S13~S14 | (450,435) | (444.4,444.4) | 10.94 |
| r8 | S4 | S14~S15 | (470,480) | (479.7,493.8) | 16.91 |
Table 4. The result of the experiment
It can be seen from the
![]()
Figure 7.The pyroelectric infrared human localization node and the experiment result (a) the pyroelectric infrared human localization node, (b) the predefined route and estimated route.
In practice, some factors can affect the accuracy of human localization by using PIRs. For example, the other heating sources in FOV, human body temperature and so on. The dynamic infrared source, such as the moving animal, the air conditioner at working, head shaking heating system and the flying curtains, can affect the localization. Commonly, the pyroelectric signals caused by above heaters are different with that of human. The interference signals can be filtered by suitable filter. And the pattern recognition algorithms can be used to recognize whether the heater is human or not [
4 Conclusion
In this paper, a field of views of pyroelectric infrared sensors modulation strategy is proposed. For the strategy, the angle resolution is related to the angle of FOV of localization system and the number of the PIRs. The proposed FOVs modulation strategy can improve the angle resolution without reduction of the detection distance of PIR. The theoretical localization error also be analyzed by using the least square estimation. The errors result from the hypothesis that the human is located at the angular bisector of the ‘triggered’ SA. In order to verify the proposed strategy. The human localization node which include nine PIRs is fabricated. The degrees of each SA, the FOV of each PIR and the detection area of the node are 4°, 36° and 68° respectively. The maximum theoretical error of the two nodes localization equipment in 600 cm×600 cm square area is about 70 cm. According to the state sequences of PIRs of the nodes, the target human position can be estimated. We set two nodes in a 600 cm×600 cm square area, and do the localization experiments. Eight positions are estimated. The minimum and maximum errors are about 4.42 cm and 16.91 cm respectively. The estimation route is close to the predefined route. The detection distance of the node is about 7 m. The experiment result indicates that the proposed FOVs modulation strategy is valid.
Acknowledge
This work supported by the National Key R&D plan (2016YFB0401500), R&D plan of Jiangsu science and technology department (BE2016173) and program B for outstanding PhD candidate of Nanjing University.
References
[1] P Chodon, D M Adhikari, G C Nepal. Passive infrared (PIR) sensor based security system. Electronics & Computer System, 14, 1-5(2013).
[2] G D Feng, X M Guo, G L Wang. Sensors and Actuators A: Physical, 186, 1-7(2012).
[3] M Chowdhury, J B Gao, R Islam. Robust human detection and localization in security applications. Concurrency and Computation-Practice & Experience, 29, e3977(2017).
[4] P Kakumanu, S Makrogiannis, N Bourbakis. A survey of skin-color modeling and detection methods. Pattern Recognition, 40, 1106-1122(2007).
[5] G C M Meijer, J Vandrecht, P C Dejong. New concepts for smart signal processors and their application to PSD displacement transducers. Sensors and Actuators A: Physical, 35, 23-30(1992).
[6] E M Tapia, S S Intille, K Larson. Activity recognition in the home using simple and ubiquitous sensors, 3001, 158-175(2004).
[7] D H Wilson, C Atkeson. binary sensor. Proceedings, 3468, 62-79(2005).
[8] L Chen, J Hoey, C D Nugent. Sensor-based activity recognition. IEEE Transactions on Systems Man and Cybernetics Part C-Applications and Reviews, 42, 790-808(2012).
[9] X Y Sun, W B Luo, J Meng. Monolithic pyroelectric infrared detectors using SiO2 aerogel thin films. Sensors and Actuators A: Physical, 228, 69-74(2015).
[10] Q Q Wu, Y Q Wang, S P Ren. Low cost and anti-noise infrared device based on saw-tooth thermal isolation structure. Sensors and Actuators A: Physical, 266, 178-184(2017).
[11] W B Luo, Q Q Wu, C G Wu. Pb(ZrTi)0.98Mn0.02O3 weight ratio effects on the properties of Pb(ZrTi)0.98Mn0.02O3/P(VDF-TrFE) compostie film and infrared detectors. Journal of Materials Science: Materials in Electronics, 28, 3474-3480(2017).
[12] W C Zhou, F M Li, D Li. A human body positioning system with pyroelectric infrared sensor. International Journal of Sensor Networks, 21, 108-115(2016).
[13] L Jiang, T Zhang, F He, et al. on sensor selection and calibration. IEEE Transactions on Systems Man Cybernetics-Systems, 47, 263-275(2017).
[14] M Shankar, J B Burchett, Q Hao. Human-tracking systems using pyroelectric infrared detectors. Optical Engineering, 45, 106401(2006).
[15] G D Feng, X M Guo, G L Wang. Infrared motion sensing system for human-following robots. Sensors and Actuators A: Physical, 185, 11-7(2012).
[16] W G Gong, K Wen, L F He. Human and Nonhuman Recognition Using Pyroelectric Infrared Detector. International Journal of Thermophysics, 33, 2237-2241(2012).
[17] J D Zhao, W G Gong, Y Z Tang. EMD-based symbolic dynamic analysis for the recognition of human and nonhuman pyroelectric infrared signals. Sensors, 16, 126.
[18] J Gong, Y Zhang, X Zhou. Pyro: Thumb-tip gesture recognition using pyroelectric infrared sensing, 553-563(2017).

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20