
Emil Marinov, Renato Juliano Martins, Mohamed Aziz Ben Youssef, Christina Kyrou, Pierre-Marie Coulon, Patrice Genevet. Overcoming the limitations of 3D sensors with wide field of view metasurface-enhanced scanning lidar[J]. Advanced Photonics, 2023, 5(4): 046005
- Advanced Photonics
- Vol. 5, Issue 4, 046005 (2023)
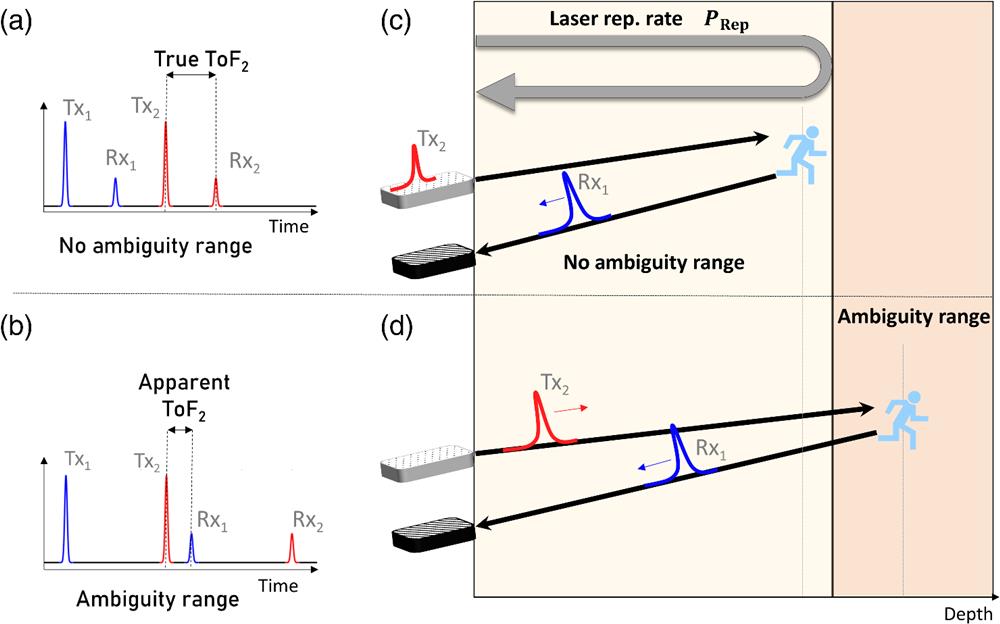
Fig. 1. Ambiguity range origin illustrated by the emission of two pulses (Tx1 and Tx2) and their respective reception on the detector (Rx1 and Rx2). (a), (c) When the target is located within the ambiguity range, each received pulse comes back to the detector before the next one is emitted; hence, the ToF is correctly recovered. (b), (d) In the ambiguity range case, the distance of the target is beyond the distance associated to the laser repetition rate, such that the first received pulse Rx1 can be detected after the second transmitted pulse Tx2 is emitted. In this case, the origin of Rx1 might be wrongfully attributed to Tx2, skewing the ToF measurement.
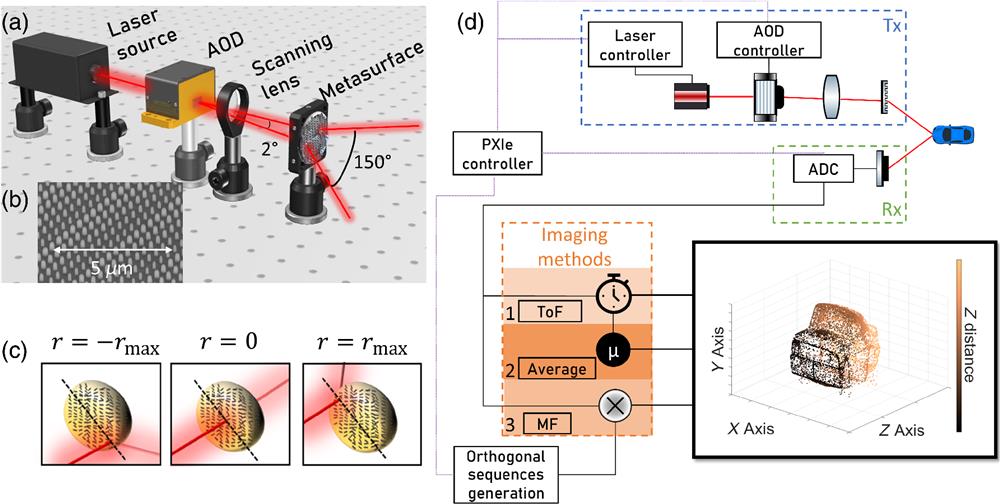
Fig. 2. Architecture of the ultrafast high FoV metasurface lidar. (a) Emission and scanning modules of the lidar. Our lidar consists of a high repetition rate 633 nm laser coupled to a 2D AOD operating as a narrow angle scanning module with a limited FoV of
Fig. 3. d-ToF imaging schemes and demonstration. (a) S-pulse d-ToF recovery scheme for four pixels. The peak detection method relies on finding the maximum of the derivative of the received signal (black dot in inset) in each time gated slice, indicated by blue, green, red, and magenta colors. ToF is measured in each time-gated slice by measuring the time between the start trigger (green triangle), initiated at the time when the pulse is sent by the transmission channel (Tx) and the stop trigger (red square), stopped when the pulse is received by the reception channel (Rx). Each pulse corresponds to a different scanned position on the FoV or pixel. (b) M-pulse d-ToF recovery scheme for two pixels. The peak detection method is the same as in S-pulse, but instead of considering only one pulse per pixel, multiple laser pulses are sent to the same pixel and ToF values are averaged. The desired effect is to increase the SNR, but this also reduces the ambiguity range. In this example,
Fig. 4. Block CDMA architecture and imaging. (a) CDMA ToF recovery scheme for three pixels. Instead of sending a single pulse or a sequence of pulses separated by the same duration to achieve M-pulse ToF measurement, we propose instead to send a specific pulse sequence at each pixel. The collection of sequences has to satisfy an orthogonality condition in order to ensure an optimal ToF recovery. The latter is performed using a matched filter, built on the correlation of the received signal with the different emitted sequences. The ToF is obtained by finding the time delay corresponding to the autocorrelation peak. The three outputs of the matched filter are computed in postprocessing and displayed on the
Fig. 5. (a) Imaging speed improvement enabled by the use of the CDMA technique with OOC codes. The theoretical repetition rate of the S-pulse technique as a function of the ambiguity distance is computed and compared to the one of CDMA for different block sizes; hence, the ambiguity ranges. Laser modulation speed is 200 MHz. As predicted, the CDMA offers a speed improvement to the system, from a factor 3 to a factor 35 as compared to the S-pulse. At our experimental scanning speed of 1.8 MHz, using OOC CDMA theoretically extends the ambiguity range from 80 m with S-pulse to 1155 m. Three regions corresponding to the speed capabilities of our lidar prototype are highlighted: in green, the region where the scanning is stable; in blue, the region where the scanning speed reaches the limits of the AOD; and in red, the inaccessible region. The zoomed inset shows that our lidar is almost meeting the requirements of the automotive lidar, with an ambiguity range of 234 m at a scanning speed of 4 MHz. For an image with a typical resolution for automotive lidars, this corresponds to a frame rate of 20 fps. (b) Highly reflective USAF-1951 calibration target used for the resolution measurement. The red line represents the position of the vertical cut for the resolution visualization. (c) Measurement of resolvable sizes for different scanning speeds with the S-pulse technique. As the scanning speed increases, the image suffers from a resolution loss, essentially due to the 1D distortion along the direction of the fast axis scanning of the AOD. The asymmetric beam shape after the AOD results in the blurring of a vertical cut of a USAF-1951 calibration target as displayed in (d). Insets represent the measured reflectivity of the lidar imaging of a USAF-1951 target located at 3 m distance, using two different beam repointing speeds of 750 kHz (bottom) and 5 MHz (top). (d) Spatial Fourier transform of the lidar image of a resolution measurement USAF-1951 target. This measurement exhibits with clear boundaries the origin of the three regions shown in (a). Color scale represents the normalized amplitude of the Fourier transform.
Fig. 6. (a) SNR comparison for the different imaging techniques as a function of the emission power. SNR is controlled by sending less signal on the scene. (b) Capacity to operate in low SNR environment. ToF of a single point is retrieved and averaged over
Fig. 7. Metasurface fabrication: (a) GaN metasurface process steps and (b) SEM image of the metasurface.
|
Table 1. PS family for p = 5
|
Table 2. Strict OOC family with M = 5

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20