
Xuchun Zhang, Hongjun Zhou, Jinjin Zheng, Yi Jin. Point Cloud Registration Based on Multi-Scale Feature and Point Distance Constraint[J]. Laser & Optoelectronics Progress, 2021, 58(24): 2415004
- Laser & Optoelectronics Progress
- Vol. 58, Issue 24, 2415004 (2021)
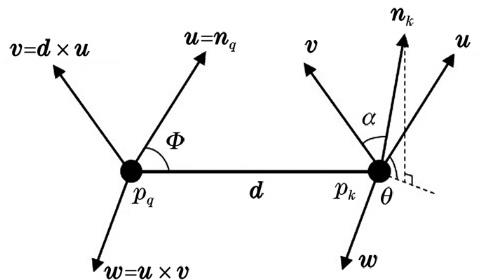
Fig. 1. Principle of the SPFH
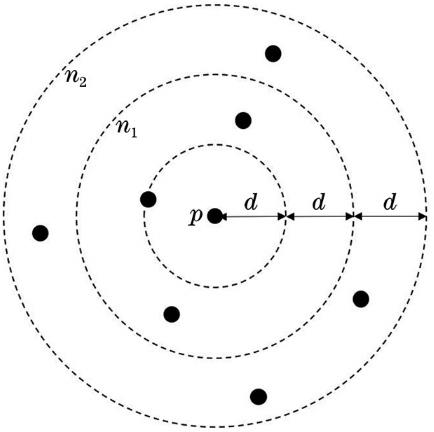
Fig. 2. Neighbor scale of center point p
Fig. 3. Matching principle of key points
Fig. 4. Point cloud registration result of our algorithm. (a) Original point cloud; (b) key points; (c) matching points and corresponding relations; (d) results of registration
Fig. 5. Fragment of the Bunny point cloud model. (a) bun000 and bun045; (b) bun090 and bun045
Fig. 6. Registration result of the Bunny point cloud. (a) bun000 and bun045; (b) bun090 and bun045
Fig. 7. Experimental results of office point cloud registration. (a) Original point cloud; (b) 4PCS; (c) Super-4PCS; (d) our algorithm
|
Table 1. Size of partial segments of point cloud models in The Stanford 3D Scanning Repository dataset
| ||||||||||||||||||
Table 2. Size of partial point cloud segments of Bunny model
| ||||||||||||||||||||||||||||||
Table 3. Registration results of different algorithms unit: mm
|
Table 4. Experimental results of registration algorithm for the point cloud of office environment

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20