
Ding Li, Xudong Yu, Guo Wei, Baolun Yuan, Chunfeng Gao, Pengfei Zhang, Guocheng Wang, Hui Luo. Development and Prospects of Long-Endurance Ring Laser Gyro Inertial Navigation System Technology[J]. Acta Optica Sinica, 2023, 43(17): 1714002
- Acta Optica Sinica
- Vol. 43, Issue 17, 1714002 (2023)
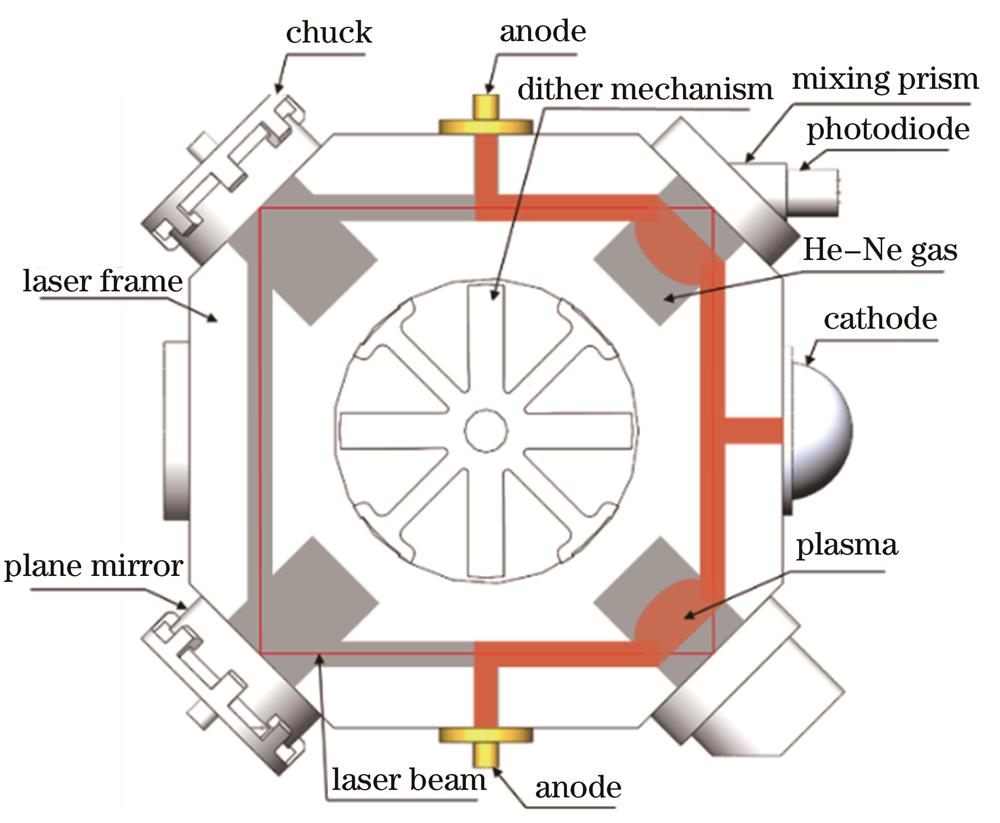
Fig. 1. Structure diagram of mechanically dithered ring laser gyro (RLG)

Fig. 2. Diagram of mechanically dithered RLG IMU
Fig. 3. Diagram of principle of RLG strapdown inertial navigation system (SINS)
Fig. 4. High-precise RLG IMU manufactured by Honeywell
Fig. 5. Key technologies of long-endurance RLG inertial navigation system
|
Table 1. Parameters of Honeywell RLG typical products
|
Table 2. Parameters of typical long-endurance RLG SINS abroad
| ||||||||||||||||||||||||
Table 3. Summary of typical initial alignment methods
|
Table 4. Summary of typical rotation modulation solutions


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20