
Ang Su, Weikang Lu, Shilin Zhang, Zhang Li. Visual Ground Target Tracking of Unmanned Aerial Vehicle Based on Target Motion Model[J]. Laser & Optoelectronics Progress, 2022, 59(14): 1415022
- Laser & Optoelectronics Progress
- Vol. 59, Issue 14, 1415022 (2022)

Fig. 1. Result of mapping the historical position of the target to the current reference frame according to homography transformation
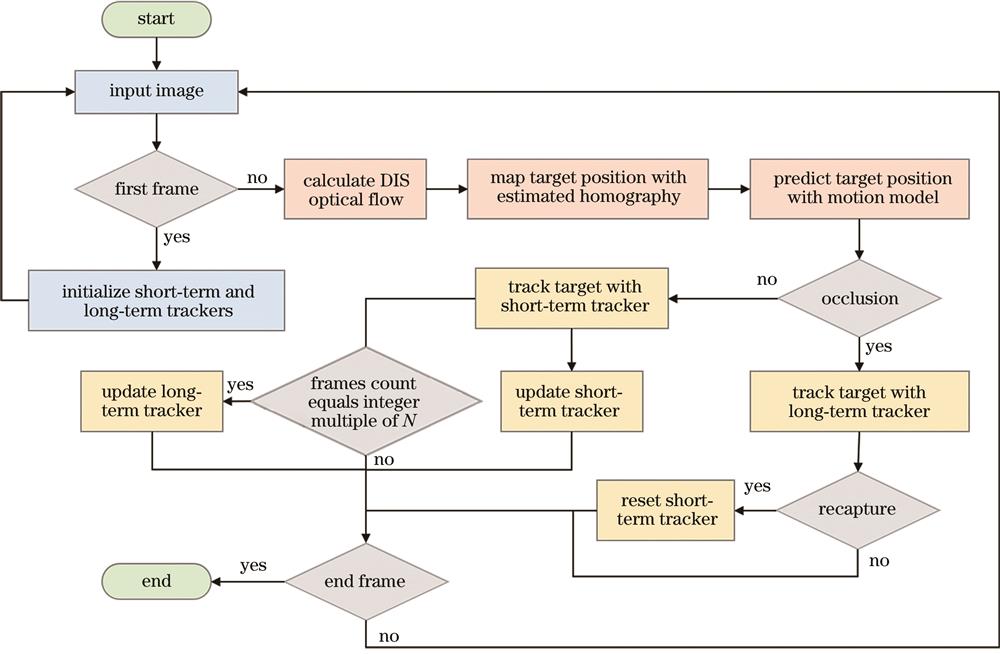
Fig. 2. Flowchat of the target tracking algorithm
Fig. 3. Object tracking results of video sequence Seq 3
Fig. 4. Object tracking results of video sequence Seq 8
Fig. 5. Experiment results of object tracking success rate and precision on collected dataset. (a) Success rate; (b) precision
Fig. 6. Experiment results of object tracking success rate and precision on VisDrone2019 partial video sequences. (a) Success rate; (b) precision
Fig. 7. Object tracking results of video sequence in VisDrone2019 dataset. (a) Seq 1; (b) Seq 2; (c) Seq 3
|
Table 1. Target tracking results for real videos captured by unmanned aerial vehicle
|
Table 2. Tracking speed of different algorithms


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20