
Jie Cao, Qun Hao, Fanghua Zhang, Chenyu Xu, Yang Cheng, Jiali Zhang, Yu Tao, Dong Zhou, Kaiyu Zhang. Research progress of APD three-dimensional imaging lidar[J]. Infrared and Laser Engineering, 2020, 49(9): 20190549
- Infrared and Laser Engineering
- Vol. 49, Issue 9, 20190549 (2020)
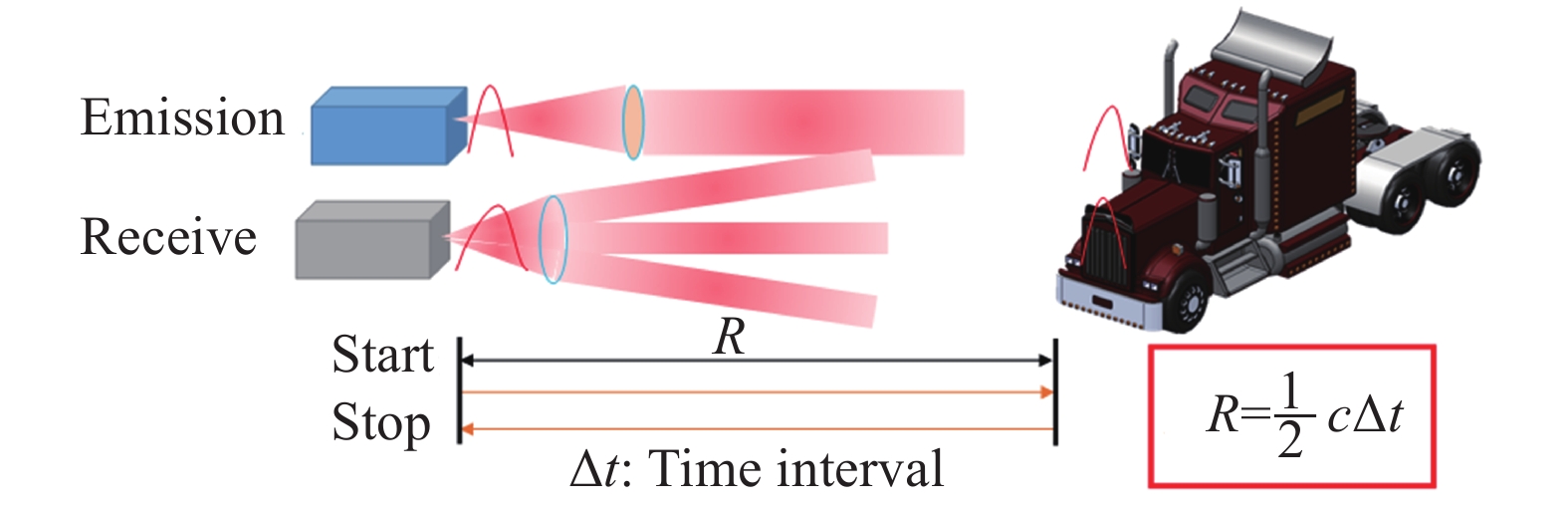
Fig. 1. Time-of-flight method ranging principle
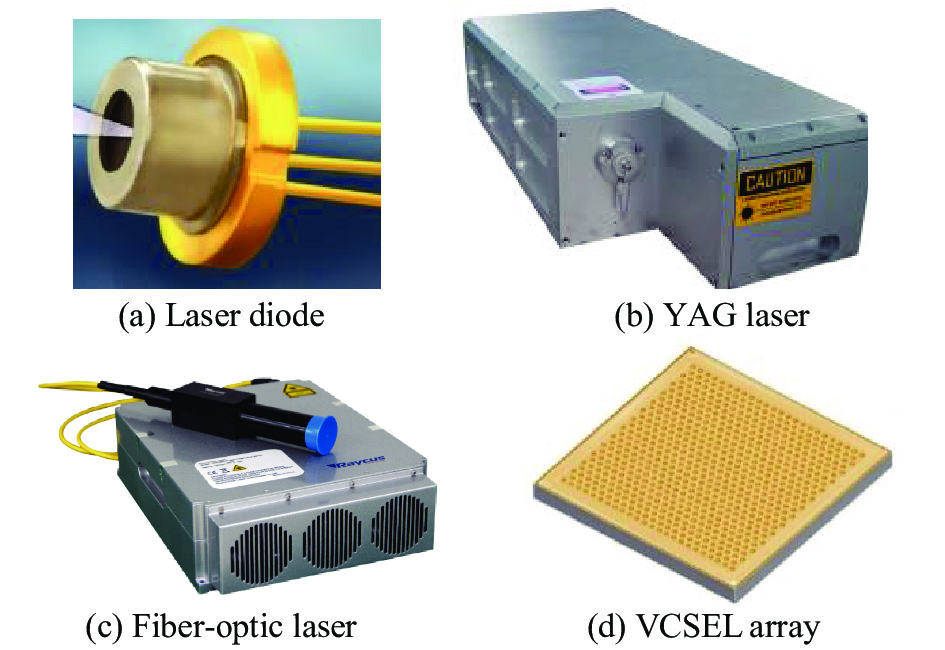
Fig. 2. Typical laser for 3D imaging laser radar
Fig. 3. Comparison of typical products of vehicle three-dimensional imaging lidar at domestic and foreign
Fig. 4. Human eye retina principle
Fig. 5. Biomimetic variable resolution imaging system
Fig. 6. Comparison of traditional two-dimensional imaging, three-dimensional imaging and ghost imaging
|
Table 1.
Mainstream filter effect comparison
主流滤波效果对比
|
Table 2.
Comparison of MEMS and OPA imaging laser radar
MEMS与OPA成像激光雷达对比

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20