
Su Wu, Chan Huang, Jing Lin, Tao Wang, Shanshan Zheng, Haisheng Feng, Lei Yu. Physics-constrained deep-inverse point spread function model: toward non-line-of-sight imaging reconstruction[J]. Advanced Photonics Nexus, 2024, 3(2): 026010
- Advanced Photonics Nexus
- Vol. 3, Issue 2, 026010 (2024)
Abstract
1 Introduction
Non-line-of-sight (NLOS) imaging technique can recover information of a hidden object from light scattered by surrounding scenes.1
The NLOS reconstruction problem is an inverse mathematical problem, aimed at recovering the hidden scene from the detected signal. Several challenges exist in NLOS imaging reconstruction. First, NLOS is an ill-posed problem characterized by a very low signal-to-noise ratio (SNR), resulting from environmental noise and high light loss along the scattered propagation path, rendering high-quality reconstruction challenging. Second, although the forward physical process is clearly understood, the physical model lacks clarity in handling multiple diffuse reflections in the NLOS system, making it difficult to obtain accurate values such as the direction of diffused light and energy attenuation. Furthermore, the inverse process is extremely complex. As a result, it is challenging to derive simple mathematical expressions directly, making high-quality image recovery for the NLOS system through a physical model difficult.
The research on NLOS imaging dates back to 2009 when Kirmani15 proposed a framework utilizing time-of-flight camera imagery and transient reasoning to reveal scene properties inaccessible to traditional computer vision. Building on Kirmani’s work, Velten16 successfully recovered the three-dimensional shape of objects hidden around corners, combining time-of-flight techniques with computational reconstruction algorithms. Subsequently, O’Toole17 introduced a confocal NLOS imaging system. The confocal system, in contrast to traditional non-confocal NLOS systems, facilitates finding a closed solution to the NLOS problem and yields higher-quality image reconstructions. Expanding on the confocal system, researchers have developed methods like light-cone transformation,18 directional light-cone transformation,19 and virtual wavefronts20 for NLOS image restoration. However, these confocal methods employ the time-of-flight approach with time-resolving detectors (such as SPAD). As a result, the system requires data capture via scanning. To ensure clarity in NLOS image reconstruction, this approach necessitates scanning numerous points, often exceeding a measurement time of 10 min. Consequently, the prolonged data acquisition required renders these methods unsuitable for real-time NLOS imaging applications.
Sign up for Advanced Photonics Nexus TOC. Get the latest issue of Advanced Photonics Nexus delivered right to you!Sign up now
With the development of machine learning and neural networks, researchers have proposed data-driven algorithms for NLOS image reconstruction. Chen et al.21 introduced a trainable architecture that maps diffuse indirect reflections to scene reflectance, relying solely on synthetic training data. To overcome the long scan time associated with traditional systems. Metzler22 employed a plane array complementary metal-oxide-semiconductor (CMOS) detector to capture speckle images within a second. However, data acquisition in NLOS imaging remains cumbersome, and there is currently a scarcity of real large-scale data sets. These synthetic images are based on the assumption that the relay wall is a standard Lambertian surface. However, in reality, the wall often deviates from a standard Lambertian surface, not conforming to isotropic theory.
The point spread function (PSF) is a core concept in image reconstruction. It describes the spot formed by a point light source after traversing the optical system, serving as a crucial link in the object-image conversion process of the optical system.23
Establishing a PSF model is crucial for image reconstruction in scattering and diffuse reflection systems. Faber35 developed a PSF model for weakly scattering media within an optical coherence tomography system, enabling the quantitative measurement of attenuation coefficients. By manipulating a specific single PSF, Xie et al.36 achieved depth-resolved imaging of thin scattering media, extending beyond the original depth of field. In the context of NLOS imaging systems, Pei et al.37 calculated the PSF employing a Gaussian-shaped laser pulse and the Poisson noise of a time-resolved camera. However, this model had limitations in accurately reflecting the NLOS scattered propagation process.
This work introduces a novel NLOS imaging recovery model that addresses these limitations, incorporating advancements in both the physical model and the computational reconstruction algorithm. We developed an accurate forward PSF model using ray tracing for the NLOS system, offering a physical constraint for an untrained neural network. Contrary to previous methods that assumed perfect isotropic reflectance, our proposed method takes into account the randomness of actual reflection angles on the relay wall. Furthermore, our method does not necessitate training data sets to ascertain neural network parameters, setting it apart from conventional deep-learning-based approaches. Instead, it starts from the random initialization parameters of the neural network, constrained by the forward physical model and speckle image, and iteratively employs the gradient descent algorithm to estimate parameters and establish the mapping relationship. Experimental data were employed to validate the proposed NLOS image reconstruction algorithm. Specifically, we make the following contributions:
2 Materials and Methods
2.1 PSF Model for NLOS Imaging
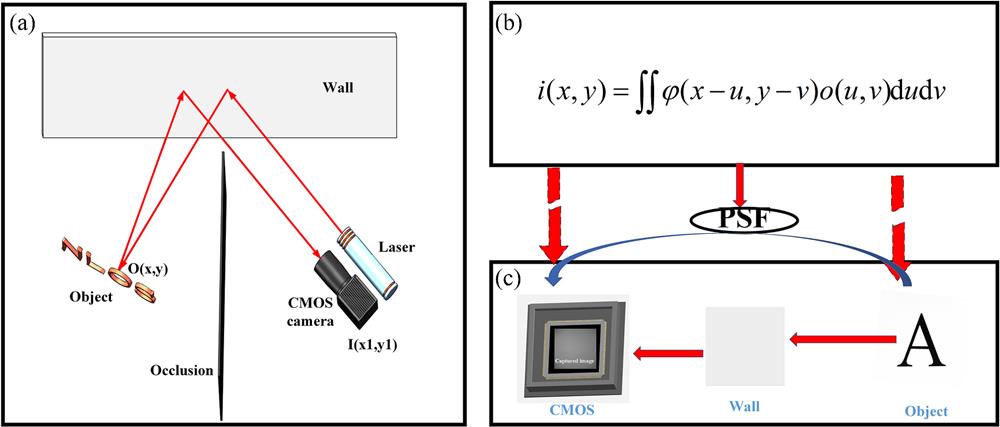
The experimental setup for the NLOS imaging system is presented in Fig. 1(a). A laser, emitting at a wavelength of 632.8 nm, is expanded and collimated by a lens group before illuminating the wall. The light scatters toward the hidden object, reflects back to the relay surface, and is captured as a speckle image by a CMOS camera. In the speckle image, each pixel corresponds to a point on the original object via the PSF matrix, depicted in Fig. 1(b), where o represents the hidden object, is the PSF matrix of the NLOS imaging system, and represents the captured speckle image. To elucidate this relationship further, Fig. 1(c) presents a simple example of a hidden object and its corresponding speckle image as captured by the camera. This experimental arrangement and the associated data lay the groundwork for assessing the efficacy of the proposed NLOS image reconstruction method.
![]()
Figure 1.The NLOS system and reconstruction principle. (a) A confocal NLOS imaging system with a CMOS camera to capture the image. (b) The imaging equation in an optical system with PSF and (c) propagation process from object to image in the NLOS system.
In this context, the relay wall of the NLOS imaging system can be conceptualized as a mirror exhibiting aberrations. This conceptualization allows for the determination of the NLOS imaging system’s PSF through wavefront aberration analysis. Specifically, the PSF of a coherent optical system is expressed as
The amplitude component of the pupil function, denoted as , is a function of the pupil shape. is the radius of the exit pupil. The parameter is equal to , where represents the wavelength of the light source. represents the wave aberration of the optical system.
The scattered light-propagation diagram is shown in Fig. 2. The diffuse reflection wall is considered as the combination of both specular reflection and diffuse reflection. Under the ideal imaging condition, the diffuse reflector is akin to a fully specular reflector. Consequently, the imaging lens group and the diffuse reflection wall form an optical system where reverse tracing is performed on the detector to obtain the position and radius of the exit pupil for the NLOS optical system. Then, the relay wall is regarded as an optical element with aberrations, and the optical source in this system can be considered as a laser diffusely reflected by the relay surface. Here, we employ an improved diffuse reflection model proposed by Wolff et al.38 in which the diffused surface is represented by microfacets arranged in V-grooves, distributed over various orientations. The diffused reflected radiance is formulated as a combination of the reflection radiance from microfacets, which accounts for masking and shadowing, and the reflection radiance due to interreflections,
![]()
Figure 2.Light path in the NLOS system. (a) Wavefront propagation process of diffuse reflection and (b) definition of diffuse reflection parameters.
For an optical system, the image captured by the detector can also be expressed by
Equation (8) represents the expression with noise depicted in Fig. 1(b) in the frequency domain. Here, signifies the PSF matrix of the NLOS system, and N symbolizes the system’s noise. Within the NLOS system, the predominant noises include photon noise, represented by Gaussian noise, and background noise, which appears as a peak and a uniform offset in the speckle image.22 To mitigate the impact of these noises on image reconstruction, regularization techniques in deep learning and data preprocessing strategies are implemented.
Retrieval of the hidden object image in the NLOS system relies on solving Eqs. (3), (7), and (8) simultaneously. The precision of the PSF matrix, especially the exact exit angle of diffuse reflection in the exit pupil, is critical for the success of this retrieval process. If the exit angle is ascertainable, the system’s wave aberration can be deduced through reverse tracking, facilitating the derivation of the NLOS system’s PSF. However, modeling the relay surface accurately becomes challenging with multiple diffuse reflections, thereby complicating the attainment of the precise angle of diffused light.
2.2 Physics-Constrained Inverse Network
A critical challenge in NLOS imaging is the unknown specifics, such as the size and location of the hidden object, and the PSF of the optical system varying with position and field of view. Consequently, accurately modeling the PSF of the NLOS system solely based on physical theory is not feasible. Deep-learning methods have been explored for computational imaging. In this approach, object reconstruction is achieved through the solution of an optimization problem. convolutional neural network (CNN), as one of the methods in deep learning, has been widely used in superresolution imaging,39
![]()
Figure 3.Flowchart of PCIN algorithm for NLOS imaging reconstruction. The speckle image captured by the camera is put into CNN, and PCIN iteratively updates the parameters in CNN using the loss function constructed by the speckle image and forward physical model. The optimized parameters are utilized to obtain a high-quality reconstructed image.
The proposed method leverages the CNN’s robust modeling capabilities to construct an inverse physical model neural network, representing the inverse physical processes of NLOS. Contrary to traditional deep-learning-based approaches, this method does not necessitate extensive training data sets to establish the parameters of this neural network. Instead, it employs a gradient descent algorithm with alternating iterations to optimize both the neural network parameters and the unknown parameters in the forward model. This optimization is constrained by the forward physical model and the measured speckle image, enabling the estimation of parameters in both the neural network and the forward model, and ultimately deriving the mapping relations. Therefore, the reconstruction of the NLOS system can be retrieved by solving the optimization problem,
3 Results
In this section, we present the experimental validation of the proposed method. The experimental setup, shown in Fig. 4, employs a laser with a wavelength of 632.8 nm and an optical power of 5 mW as the light source. A lens group expands the beam, increasing the collimated beam diameter to 3 mm, thereby illuminating the hidden object. The Dyhana 4040 CMOS camera with a sensitive area of and a field of view of 40 deg is chosen as the detection device, which is capable of capturing information from the NLOS system after 3 times of diffuse reflection. To adequately capture the hidden object’s information without overexposure, the camera is set to capture images with a 40 ms exposure time.
![]()
Figure 4.Back and front of the experimental scene. Light passes from the laser, to the collimator, to the wall, to the hidden object, and finally to the camera.
To evaluate the effectiveness of our proposed methodology, four letters were chosen for imaging experiments. Specifically, the light source was positioned 1.2 m from the relay wall with an incident angle of 15 deg, and the hidden object was placed with a 1-m separation from both the camera and the relay wall.
The reconstruction results of different exposure time and different postures for the selected hidden objects are presented in Figs. 5 and 6, illustrating the capability of the proposed PCIN method to reconstruct the shape of hidden objects from diffused images. It is noteworthy that with camera exposure time of fewer than 20 ms, the algorithm is generally unable to complete the reconstruction due to insufficient information capture within such a brief period. As the exposure time increases, there is a corresponding enhancement in the accuracy and detail of the reconstructed image. At an exposure time of 40 ms, the detailed features of the object are essentially reconstructed. However, increased exposure time inevitably leads to more noise in the system, manifesting as poorer reconstruction quality at the image edges.
![]()
Figure 5.Comparison of the reconstructed images of various exposure time from the proposed PCIN method. (a) Speckle images of different exposure time captured by the camera. (b) Ground truth. (c) Reconstructed images of different exposure time.
![]()
Figure 6.Comparison of the reconstructed images of various exposure time from the proposed PCIN method. (a) Speckle images of different exposure time captured by the camera. (b) Ground truth. (c) Reconstructed images of different exposure time.
Encouragingly, in the initial run, the network required more than 4000 iterations and took several minutes to achieve satisfactory results. For subsequent runs involving the same object type, the optimization time was reduced to approximately 1800 iterations by leveraging the previous run’s optimization results as input. Figure 6 displays the NLOS imaging reconstruction results following posture changes. The results indicate that the proposed method can precisely recover fine features and accurately determine the position and posture of hidden objects.
For further validation of the algorithm’s performance, we chose more complex subjects, including cartoon images and Chinese characters, as hidden objects. Similarly, the detector’s exposure time varied from 10 to 40 ms. The inversion results of the algorithm are shown in Fig. 7. With the increased complexity of the object, shorter exposure time (10 to 20 ms) prove inadequate for reconstructing the hidden object. This suggests that with complex hidden objects, shorter exposure time fail to capture sufficient effective information. When the exposure time is increased to 30 ms, the algorithm can essentially reconstruct the approximate shape of the object under examination. At an exposure time of 40 ms, the algorithm fully reconstructs the shape of hidden objects, capturing relatively fine features as well, demonstrating its efficacy in reconstructing complex objects.
![]()
Figure 7.Comparison of the reconstructed cartoon images and Chinese characters of various exposure time from the proposed PCIN method. (a) Speckle images of different exposure time captured by the camera. (b) Ground truth. (c) Reconstructed images of different exposure time.
To evaluate the algorithm’s adaptability to diffusely reflecting walls of various shapes, we fabricated concave, convex, and wavy diffusely reflecting walls using highly flexible white foam. The camera exposure time was set to 40 ms to capture more information about the hidden objects. The reconstructed images, as illustrated in Fig. 8, reveal that surface variations of the diffusely reflecting walls lead to differences in the reconstruction of the same object. Nevertheless, the reconstruction was generally successful. The wavy surface resulted in the poorest reconstruction outcome. This is attributed to the creases of the wavy surface acting as light traps, causing the light to undergo multiple diffuse reflections. Consequently, the quantity of light carrying information about the target object that enters the detector is diminished, reducing the precision and detail of the reconstructed images.
![]()
Figure 8.Comparison of the reconstructed images of convex, concave, and wavy walls.
The NLOS reconstruction can be seen as a phase-retrieval (PR) problem. We compared the proposed PCIN method with the alternating minimization PR algorithm (Alt-Min) from Ref. 46 and the traditional CNN method from Ref. 22. The training data set for CNN is synthesized by a physical model. For better reconstruction results, the exposure time is chosen as 40 ms. The comparative results in Fig. 9 demonstrate that both the PCIN- and CNN-based methods outperform traditional PR methods in terms of reconstruction quality within the same exposure time. Subsequently, the incidence angle was adjusted to 10 deg. Notably, the CNN network model utilized parameters trained in the previous step, rather than undergoing retraining. The reconstructed images in Fig. 10 illustrate the limited universality of the traditional CNN network, highlighting its inapplicability in changing external environments. This implies that both the PR algorithm and our proposed PCIN algorithm excel in reconstructing NLOS images amid external environmental changes, whereas the deep-learning approach necessitates generating new training data and retraining for each new scene.
![]()
Figure 9.Comparison of the reconstructed images of PR, CNN, and PCIN methods at 40 ms exposure time.
![]()
Figure 10.Comparison of the reconstructed images of PR, CNN, and PCIN methods after a 10 deg change in image plane inclination.
The reconstruction results under a 20 ms exposure time are shown in Fig. 11. Under conditions of poor SNR, the PR algorithm is ineffective in reconstructing NLOS imaging results. Conversely, both CNN and the proposed PCIN method demonstrate strong noise robustness.
![]()
Figure 11.Comparison of the reconstructed images of PR, CNN, and PCIN methods at 20 ms exposure time.
The PR algorithm was initialized with spectral initializers and used default parameters.47 To optimize for the best reconstruction, several minutes were used for PR and 38 h were used for CNN to train parameters for net. Under low exposure conditions, the number of optimization iterations for each algorithm increases, yet the overall time remains relatively consistent. From the above analysis, it is evident that both PR and PCIN methods do not require extensive data and exhibit superior adaptability to various scenes compared to the CNN method. Regarding runtime, the PR and the proposed model operate on a similar scale, with both taking approximately several minutes. While there are variations in the results depending on different objects, these variations are not markedly significant. However, at low SNRs, PR fails to reconstruct hidden objects, while both PCIN and CNN exhibit robust noise resistance.
4 Discussion and Conclusion
In this study, we present a novel theoretical framework for NLOS imaging based on a PSF physical model. The proposed approach incorporates wave aberration theory and reverse tracking to determine the pupil and obtain the PSF model of the NLOS system. Additionally, we introduce an innovative inverse network framework, embedding a physics-constrained neural network, to optimize unknown parameters in the physical model via neural network iteration. This method achieves precise reconstruction outcomes through mutual feedback between the neural network and the physical model. Although involving an iterative process and potentially time-consuming for reconstructions, this method significantly eliminates the need for paired data sets during training. Consequently, this results in substantial time savings in data preparation.
Experimental validation on NLOS imaging data confirms the method’s success in reconstructing hidden objects from a single measured speckle image with a 40 ms exposure time using a traditional CMOS detector. The combination of the PSF model and deep learning demonstrates potential for NLOS imaging in complex environments, such as rescue operations and field exploration, and represents a significant advancement towards high-resolution NLOS imaging.
In summary, this method fundamentally optimizes the traditional physical model using deep-learning techniques. In the NLOS system, due to the random nature of diffuse reflections, both the forward and reverse models cannot be obtained precisely. Specifically, the emergence angle at the optical pupil in the forward tracing cannot be determined, which prevents the direct establishment of the PSF matrix in the reverse model. However, by integrating deep learning with the physical model, the emergence angle in the physical model can be optimized, enabling the reconstruction of an image from a speckle image without training data or ground truth. Our proposed algorithm achieves superior performance that neither the physical model nor deep learning alone can achieve. This makes it ideal for scenarios like hostage rescue or intelligent driving in complex environments, where extensive real measurement data for training is not available. Unlike deep-learning methods that rely on specific scenes, our algorithm can be applied to a wide range of scenes and scenarios. Moreover, our model more accurately mirrors the real NLOS propagation process compared to the traditional, simplified NLOS physical model. Nonetheless, the model still has some limitations, such as deviations in reconstruction accuracy, particularly at the edge, and longer running time. Our future work will be focused on enhancing the algorithm’s performance, accuracy, and running speed to enable real-time rapid NLOS reconstruction.
Biographies of the authors are not available.
References
[3] T. Maeda et al. Thermal non-line-of-sight imaging, 1-11(2019).
[4] Y. Altmann et al. Quantum-inspired computational imaging. Science, 361, eaat2298(2018).
[12] T. Maeda et al. Recent advances in imaging around corners(2019).
[15] A. Kirmani et al. Looking around the corner using transient imaging, 159-166(2009).
[17] M. O’Toole, D. B. Lindell, G. Wetzstein. Real-time non-line-of-sight imaging, 1-2(2018).
[21] W. Chen et al. Steady-state non-line-of-sight imaging, 6790-6799(2019).
[46] P. Netrapalli, P. Jain, S. Sanghavi. Phase retrieval using alternating minimization, 2796-2804(2013).

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20