Author Affiliations
1Key Laboratory of Metallurgical Equipment and Its Control, Ministry of Education, School of Machinery and Automation, Wuhan University of Science and Technology, Wuhan 430081, Hubei, China2Hubei Key Laboratory of Mechanical Transmission and Manufacturing Engineering, Wuhan University of Science and Technology, Wuhan 430081, Hubei, China3Institute of Precision Manufacturing, Wuhan University of Science and Technology, Wuhan 430081, Hubei, China4Jiangsu Jianlong Shore Power Technology Co., Ltd., Yixing 214200, Jiangsu, Chinashow less
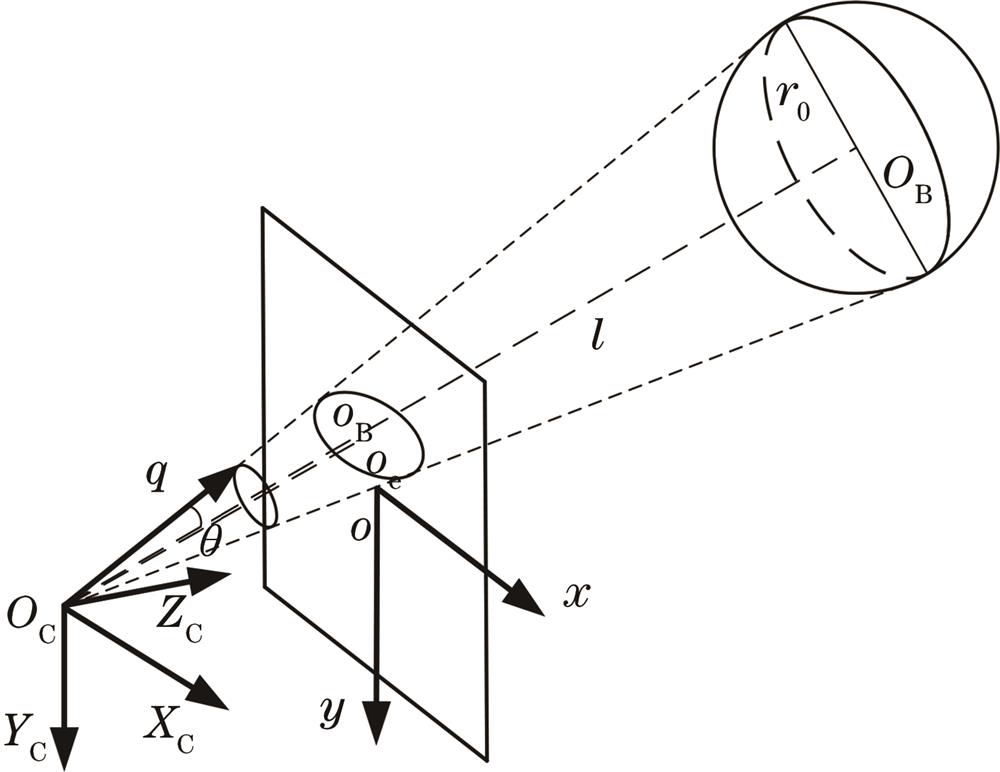
Fig. 1. Sphere imaging model
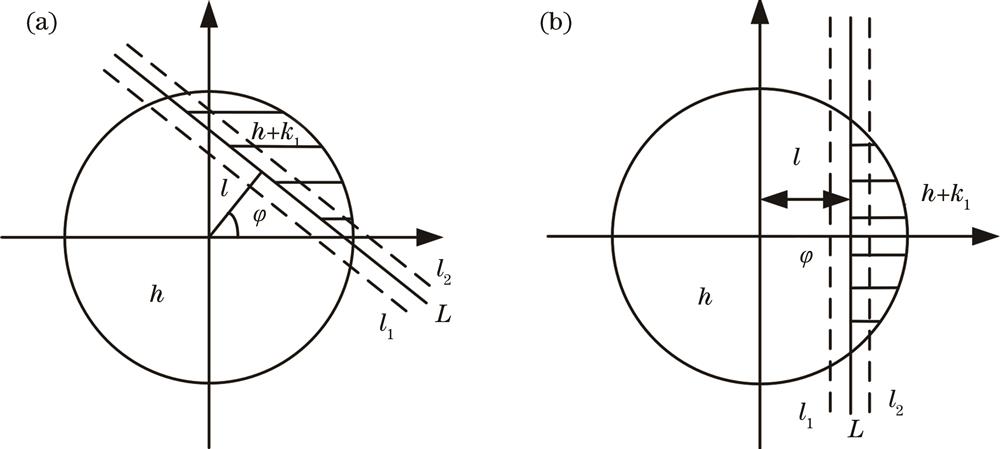
Fig. 2. Schematic of Zernike moment edge detection principle. (a) Original edge map; (b) edge map after rotating φ
Fig. 3. Flowchart of the proposed method
Fig. 4. Blurred ellipse image with size of 140×140. (a) Ellipse without rotation; (b) ellipse after rotating 45°
Fig. 5. 140×140 ellipse simulation error. (a) Horizontal axis error; (b) vertical axis error
Fig. 6. 280×280 ellipse simulation error. (a) Horizontal axis error; (b) vertical axis error
Fig. 7. Influence of salt and pepper noise on ellipse center. (a) Horizontal axis error; (b) vertical axis error
Fig. 8. Monocular measurement experimental platform
Fig. 9. Checkerboard calibration board
Fig. 10. Experimental scheme for measuring the distance of spherical targets
Fig. 11. Experimental results. (a) Experimental results of Group A; (b) experimental results of Group B
Fig. 12. Experimental results of Group C. (a) Absolute deviation comparison; (b) cumulative absolute deviation comparison
| | | | | | | | |
|---|
| 2303.012 | 2303.633 | 1344.870 | 1010.973 | -0.123 | 0.132 | 0.027 | -0.000382 | -0.000755 |
|
Table 1. Calibration results
| Group | Center coordinate before correction /pixel | Measured value before correction /mm | Error value before correction /mm | Center coordinate after correction /pixel | Measured value after correction /mm | Error value after correction /mm |
|---|
| 1 | (340.826,115.024) | 10.055 | 0.055 | (340.090,114.776) | 9.968 | 0.032 | | (264.222,115.977) | (263.653,115.727) | | 2 | (264.222,115.977) | 10.047 | 0.047 | (263.653,115.727) | 10.034 | 0.034 | | (187.397,116.945) | (186.993,116.693) | | 3 | (187.397,116.945) | 10.099 | 0.099 | (186.993,116.693) | 10.006 | 0.006 | | (110.848,117.984) | (110.610,117.731) | | 4 | (110.848,117.984) | 10.149 | 0.149 | (110.610,117.731) | 9.977 | 0.023 | | (34.633,119.028) | (34.559,118.771) | | 5 | (34.633,119.028) | 10.079 | 0.079 | (34.559,118.771) | 10.007 | 0.007 | | (-41.641,120.113) | (-41.552,119.856) |
|
Table 2. Experimental results of Group A
| Group | Center coordinate before correction /pixel | Measured value before correction /mm | Error value before correction /mm | Center coordinate after correction /pixel | Measured value after correction /mm | Error value after correction /mm |
|---|
| 1 | (-41.643,120.128) | 10.038 | 0.038 | (-41.554,119.870) | 10.010 | 0.010 | | (34.651,119.043) | (34.576,118.787) | | 2 | (34.651,119.043) | 10.038 | 0.038 | (34.576,118.787) | 9.973 | 0.027 | | (110.829,118.025) | (110.590,117.772) | | 3 | (110.829,118.025) | 10.095 | 0.095 | (110.590,117.772) | 10.009 | 0.009 | | (187.371,116.960) | (186.968,116.708) | | 4 | (187.371,116.960) | 10.150 | 0.150 | (186.968,116.708) | 10.036 | 0.036 | | (264.222,116.004) | (263.653,115.754) | | 5 | (264.222,116.004) | 10.099 | 0.099 | (263.653,115.754) | 9.964 | 0.036 | | (340.793,115.047) | (340.057,114.799) |
|
Table 3. Experimental results of Group B
| Group | Center coordinate before correction /pixel | Measured value before correction /mm | Error value before correction /mm | Center coordinate after correction /pixel | Measured value after correction /mm | Error value after correction /mm |
|---|
| 1 | (344.135,111.779) | 5.051 | 0.051 | (343.394,111.538) | 4.987 | 0.013 | | (305.716,112.475) | (305.059,112.233) | | 2 | (305.716,112.475) | 5.045 | 0.045 | (305.059,112.233) | 4.983 | 0.017 | | (267.466,113.043) | (266.892,112.801) | | 3 | (267.466,113.043) | 5.068 | 0.068 | (266.892,112.801) | 5.008 | 0.008 | | (229.153,113.643) | (228.661,113.400) | | 4 | (229.153,113.643) | 5.087 | 0.087 | (228.661,113.400) | 5.039 | 0.039 | | (190.598,114.274) | (190.190,114.029) | | 5 | (190.598,114.274) | 5.093 | 0.093 | (190.190,114.029) | 5.038 | 0.038 | | (152.295,114.942) | (151.968,114.696) | | 6 | (152.295,114.942) | 5.047 | 0.047 | (151.968,114.696) | 5.002 | 0.002 | | (114.182,115.503) | (113.937,115.256) | | 7 | (114.182,115.503) | 5.042 | 0.042 | (113.937,115.256) | 5.001 | 0.001 | | (76.118,116.148) | (75.954,115.899) | | 8 | (76.118,116.148) | 5.050 | 0.050 | (75.954,115.899) | 5.016 | 0.016 | | (37.956,116.784) | (37.875,116.532) | | 9 | (37.956,116.784) | 5.357 | 0.357 | (37.875,116.532) | 5.008 | 0.008 | | (-0.214,117.413) | (-0.213,117.159) | | 10 | (-0.214,117.413) | 4.978 | 0.022 | (-0.213,117.159) | 4.980 | 0.020 | | (-38.337,118.122) | (-38.254,117.867) |
|
Table 4. Experimental results of Group C