
Shijie Feng, Yile Xiao, Wei Yin, Yan Hu, Yixuan Li, Chao Zuo, Qian Chen, "Fringe-pattern analysis with ensemble deep learning," Adv. Photon. Nexus 2, 036010 (2023)
- Advanced Photonics Nexus
- Vol. 2, Issue 3, 036010 (2023)
Abstract
Keywords
Video Introduction to the Article
00:00
00:00
/
01:30
弹幕
vr模式
流畅
自动
2x
1.5x
1.2x
1x
0.5x
字幕
模式
视频音频
线路
vr模式
裸眼眼镜
播放器
FlashHTML5
画中画
网页全屏
全屏
1 Introduction
Optical metrology plays a significant role in many fields because of its merits of noninvasiveness, flexibility, and high accuracy. In optical metrology, fringe-pattern analysis is indispensable to many tasks, e.g., interferometry, fringe projection profilometry, and digital holography. According to the number of patterns used, fringe-pattern analysis can be generally classified into two categories: single-frame and multiframe methods. The Fourier-transform fringe-pattern analysis is a representative single-frame approach1 that converts a fringe pattern into the frequency domain and extracts the phase information by filtering the first order of the spectrum. This method is suitable for measuring dynamic scenes because it only needs a single fringe image. However, it tends to compromise on handling complex surfaces, owing to the spectrum aliasing issue. In contrast, the multiframe approaches, e.g., the
Recently, many advances have emerged in the field of optical metrology that benefit from harnessing the power of deep learning.3,4 Fringe-pattern analysis using deep learning has shown promising performance in measuring complex contours using a single fringe image.5 As a data-driven approach, it can exploit useful hidden clues that may be overlooked by traditional physical models, thus showing potential for resolving the contradiction between efficiency and accuracy in the phase demodulation. However, it is not trouble-free for this kind of approach. Usually, people adopt a single deep neural network (DNN) and depend on it completely to handle all possible measurements once it is trained. Actually, this is risky, as the DNN may only learn limited attributes of input data because of its fixed structure. Consequently, it tends to demonstrate high variance for unseen scenarios. Further, the DNN may converge to a local loss minimum during training, which further increases the risk of making unreliable predictions.
To handle these issues, ensemble deep learning has been developed,6,7 which refers to a set of strategies where, rather than relying on a single model, several base models are combined to perform tasks. As different architectures can capture distinct information, better decisions can be made by combining different networks. Inspired by recent successful applications of ensemble deep learning, we demonstrate for the first time, to the best of our knowledge, that an ensemble of multiple deep-learning models can improve the accuracy and the stability of fringe-pattern analysis substantially. First, multiple state-of-the-art DNNs for fringe-pattern analysis are employed as base models. To train the base models, we propose a
Sign up for Advanced Photonics Nexus TOC. Get the latest issue of Advanced Photonics Nexus delivered right to you!Sign up now
2 Methods
In fringe-pattern analysis, a fringe image is often written as
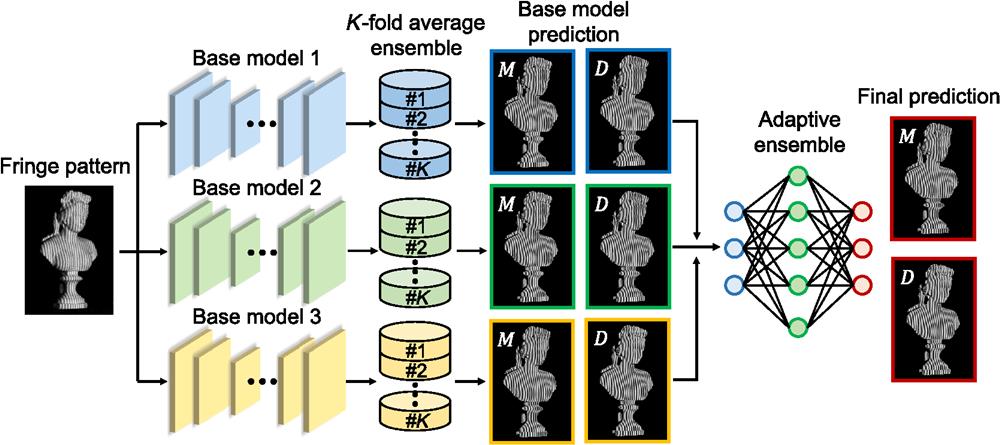
Instead of relying on a single model, we train several base models to analyze the same input fringe image and combine their outputs as the final prediction. Figure 1 demonstrates the diagram of the proposed framework. First, three state-of-the-art models for fringe-pattern analysis are selected as base models. The first two models are the U-Net8 and the multipath DNN (MP DNN),5 which are convolutional neural networks that are good at extracting local features. The third model is the Swin–Unet,9 which is a vision transformer that shows the advantage of capturing global information. The structures of base models are detailed in the Supplementary Material. As these models have different architectures, diverse attributes of the input data can be learned. To train the base models, we develop a
![]()
Figure 1.Diagram of the fringe-pattern analysis using ensemble deep learning. The input fringe image is processed by three base models. In each base model, a
![]()
Figure 2.Diagram of the
To further combine the predictions of the base models, we develop an adaptive ensemble that adopts a MultiResUNet to fuse the features of different models adaptively.11 The diagram of the adaptive ensemble is shown in Fig. 3. The feature extraction is enhanced by MultiRes blocks that use a series of
![]()
Figure 3.Diagram of the proposed adaptive ensemble. (a) It trains a MultiResUNet to combine the predictions of base models. (b) Structure of the MultiRes block, where a series of
3 Results
We validated the presented method under the scenario of fringe projection profilometry. The system consists of a camera (V611, Vision Research Phantom) and a projector (DLP 4100, Texas Instruments). The measured scene was illuminated by the projector with a sinusoidal fringe pattern, and the fringe image was captured by the camera from a different viewing point. To collect the training data, many fringe images of various objects were captured. To generate the ground-truth labels, the 12-step PS algorithm was applied. The captured fringe patterns are 8-bit gray-scale images. In the data preprocessing stage, the input fringe pattern was divided by 255 for normalization before being fed into the DNNs. Further details about the optical setup and the calculation of the ground-truth data are provided in the Supplementary Material. For the adaptive ensemble, the training data were generated using the trained base models. All base models and the MultiResUNet were implemented by the Keras and computed on a graphic card (GTX Titan, NVIDIA).
To test the performance of our approach, we measured three different scenarios that were not seen by these networks during training. They are a set of statues, an industrial part made of aluminium alloy, and a desk fan made of plastic. The experimental results regarding each stage of our approach are shown in Fig. 4. Here, for better performance, a seven-fold average ensemble was used to train each base model. So, we divided the training data into seven parts and trained seven homogeneous models for each base model. Given an input fringe pattern, the homogeneous models gave predictions independently, and Eq. (4) was used to compute the average. As there were three base models, three pairs of numerators and denominators were obtained for each input image. These predictions were further combined by being fed into the adaptive ensemble that output the final prediction and calculated the wrapped phase.
![]()
Figure 4.Experimental results of several unseen scenarios that include a set of statues, an industrial part, and a desk fan. The input is a fringe pattern. It is then fed into the U-Net, MP DNN, and Swin-Unet, which are trained by the sevenfold average ensemble, respectively. By calculating the average, each base model outputs a pair of numerators and denominators. Then, the outputs of base models are processed by the adaptive ensemble, which combines the contribution of each base model and calculates the wrapped phase.
For quantitative analysis, the ground-truth phase was obtained by the 12-step PS method. For comparison, the fringe image was also analyzed by a single U-Net; its absolute phase error is shown in Fig. 5(a). For the first scenario, we can see that the phase of smooth areas is retrieved accurately, while that of complex regions is measured with large errors. The mean absolute error (MAE) of the whole scene is 0.085 rad. The phase error of our approach is shown in Fig. 5(b). As can be seen, the phase error of the first scene has been reduced effectively. For detailed investigation, two regions of interest (ROIs), i.e., two complex regions around hairs, were selected. We can see that our method performs much better than the U-Net for handling the complex areas of depth variations and edges. Quantitatively, the MAE was greatly reduced to 0.061 rad when our method was used. For the second scenario, the MAE of the U-Net is 0.076 rad, and obvious errors can be observed around the edges and the small raised letters on the surface of the object, as can be seen in Figs. 5(b) and 5(c). When our approach was applied, these phase errors were apparently reduced, and the MAE of the scene has been reduced to 0.054 rad. Last, for the third scenario, our method also outperformed the U-Net, as the MAE decreased significantly from 0.080 to 0.059 rad, demonstrating the accuracy improvement by 26%.
![]()
Figure 5.Comparison of the proposed method with the U-Net. (a) and (b) The absolute phase error maps of the U-Net and our method, respectively. (c) Selected ROIs of the phase error for the two methods. (d) The performance of different
To further validate the proposed method, we investigated the effect of the ensemble size of the
| Method | MAE of #1 (rad) | MAE of #2 (rad) | MAE of #3 (rad) |
| U-Net (single) | 0.085 | 0.076 | 0.080 |
| MP DNN (single) | 0.089 | 0.074 | 0.085 |
| Swin-Unet (single) | 0.081 | 0.075 | 0.081 |
| U-Net (seven-fold) | 0.072 | 0.065 | 0.067 |
| MP DNN (seven-fold) | 0.074 | 0.062 | 0.072 |
| Swin-Unet (seven-fold) | 0.069 | 0.063 | 0.067 |
| Adaptive ensemble | 0.061 | 0.054 | 0.059 |
Table 1. Quantitative validation of the proposed approach.
4 Conclusions
In this work, we have proposed a novel fringe-pattern analysis method using ensemble deep learning, which can exploit the contributions of multiple state-of-the-art DNNs. The
Shijie Feng received his PhD in optical engineering at Nanjing University of Science and Technology. He is working as an associate professor at Nanjing University of Science and Technology. His research interests include phase measurement, high-speed 3D imaging, fringe projection, machine learning, and computer vision.
Yile Xiao is pursuing his MS degree at Nanjing University of Science and Technology. His research interests include phase measurement, high-speed 3D imaging, fringe projection, and deep learning.
Wei Yin received his PhD from Nanjing University of Science and Technology. His research interests include deep learning, high-speed 3D imaging, fringe projection, and computational imaging.
Yan Hu received his PhD from Nanjing University of Science and Technology. His research interests include high-speed microscopic imaging, 3D imaging, and system calibration.
Yixuan Li is a PhD student at Nanjing University of Science and Technology. Her research interests include phase measurement, high-speed 3D imaging, fringe projection, and deep learning.
Chao Zuo received his BE and PhD degrees from Nanjing University of Science and Technology (NJUST) in 2009 and 2014, respectively. He was working as a research assistant at the Centre for Optics and Lasers Engineering, Nanyang Technological University, from 2012 to 2013. Currently, he is working as a professor in the Department of Electronic and Optical Engineering and principal investigator of the Smart Computational Imaging Laboratory, NJUST. His research interests include computational imaging and high-speed 3D sensing and has authored over 160 peer-reviewed journal publications. He has been selected for the Natural Science Foundation of China for Excellent Young Scholars and the Outstanding Youth Foundation of Jiangsu Province, China. He is the fellow of SPIE and Optica.
Qian Chen received his BS, MS, and PhD degrees from Nanjing University of Science and Technology. Currently, he is working as a professor and vice-principal at Nanjing University of Science and Technology. He has been selected as Changjiang Scholar Distinguished Professor. With broad research interests in photoelectric imaging and information processing, he has authored more than 200 journal papers. His research team develops novel technologies and systems for non-interferometric quantitative phase imaging and high-speed 3D sensing and imaging with particular applications in national defense, industry, and bio-medicine.
References
[4] C. Zuo et al. Deep learning in optical metrology: a review. Light: Sci. Appl., 11, 39(2022).
[5] S. Feng et al. Fringe pattern analysis using deep learning. Adv. Photonics, 1, 025001(2019).
[6] M. A. Ganaie et al. Ensemble deep learning: a review. CoRR(2021).
[9] H. Cao et al. Swin-unet: Unet-like pure transformer for medical image segmentation(2021).


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20