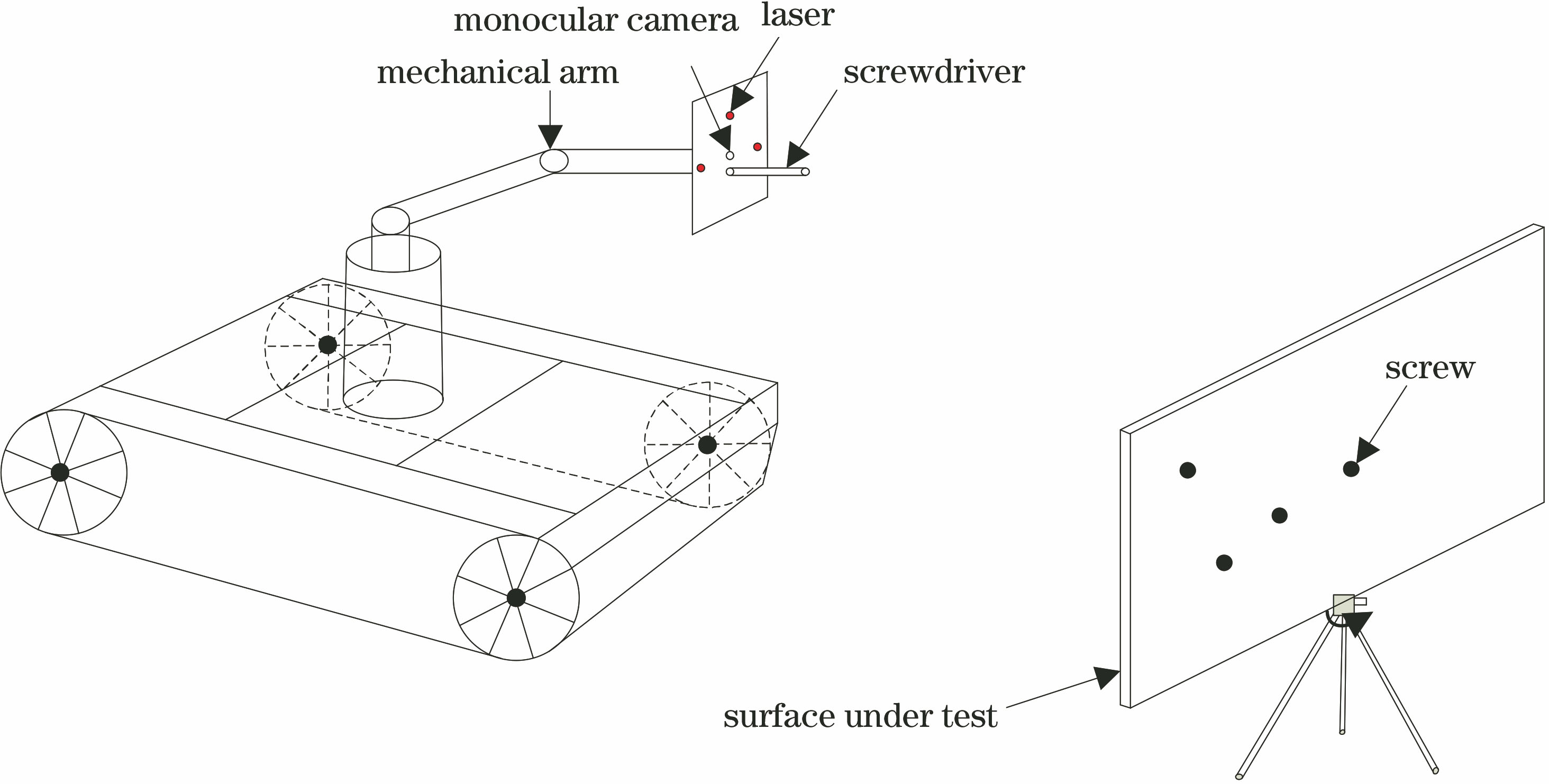
Fig. 1. Prototype of patrol robot
Fig. 2. Geometry of ranging model
Fig. 3. Optimization process of ranging iteration
Fig. 4. Top view of model at yaw angle α
Fig. 5. Side view of model at yaw angle α
Fig. 6. Conversion diagram of 2D image plane
Fig. 7. Schematic of ranging experiment
Fig. 8. Laser feature point image
Fig. 9. Range error before iterative optimization
Fig. 10. Range error after iterative optimization
Fig. 11. Change curves of α
Fig. 12. Change curves of β
| Parameter | Dd=200 mm | Dd=300 mm | Dd=400 mm |
|---|
| (u0,v0) | (374.0713,247.3269) | (375.0696,254.5587) | (370.4775,261.5021) | | k1,k2,k3 | -0.4326,0.3485,-0.3550 | -0.4117,0.2202,-0.0455 | -0.4197,0.1801,0.0353 | | p1,p2 | 0.000891,-0.00001 | 0.001667,-0.00156 | -0.00094,-0.00037 | | f/dx,f/dy | 534.9416534.5830 | 533.6267533.4545 | 521.0727520.2335 | | f·χ | 1.508681 | 0.201046 | -1.24714 | | Parameter | Dd=500 mm | Dd=600 mm | | | (u0,v0) | (372.8207,257.5171) | (370.9425,257.2861) | | | k1,k2,k3 | -0.4248,0.2323,0.0069 | -0.3971,0.0435,0.4982 | | | p1,p2 | -0.00079,0.00004 | -0.00014,0.000147 | | | f/dx,f/dy | 517.0429516.2078 | 515.2002514.8023 | | | f·χ | -1.22721 | -0.74539 | |
|
Table 1. Internal parameters of monocular camera
| Category | Value |
|---|
| Measuring range /m | 0.05~150.00 | | Accuracy of measurement /mm | ±1.0 | | Minimum resolution /mm | 0.1 |
|
Table 2. Technical parameters of Laika X3 handheld laser rangefinder
| Laser pointnumber | Accuratecoordinate | Detectedcoordinate |
|---|
| A | (375,187) | (375.105,187.453) | | B | (297,257) | (296.639,256.806) | | C | (448,253) | (447.975,253.512) |
|
Table 3. Detection results of laser feature points
| Actual distance /mm | Dd=200 mm /mm | Dd=300 mm /mm | Dd=400 mm /mm | Dd=500 mm /mm | Dd=600 mm /mm | Rangingresults afteriterativeoptimization /mm | Maximumerror /mm |
|---|
| 200 | 199.37 | 194.11 | 180.87 | 179.69 | 178.62 | 199.37 | 0.63 | | 250 | 248.54 | 249.02 | 241.12 | 235.90 | 234.33 | 249.02 | 0.98 | | 300 | 303.71 | 300.61 | 304.99 | 318.98 | 321.08 | 300.61 | 0.61 | | 350 | 354.98 | 350.35 | 353.11 | 351.20 | 358.12 | 350.35 | 0.35 | | 400 | 417.18 | 408.72 | 400.92 | 407.88 | 413.08 | 400.92 | 0.92 | | 450 | 464.60 | 466.51 | 451.77 | 450.63 | 453.72 | 450.63 | 0.63 | | 500 | 528.45 | 527.81 | 510.43 | 500.53 | 511.66 | 500.53 | 0.53 | | 550 | 594.74 | 587.30 | 579.51 | 550.71 | 552.92 | 550.71 | 0.71 | | 600 | 625.99 | 622.03 | 616.27 | 613.05 | 600.46 | 600.46 | 0.46 |
|
Table 4. Ranging results of iterative method
| Measureddistance /mm | P3P algorithm | Proposed algorithm |
|---|
| Measuredangle /(°) | Error /(°) | Averageerror /(°) | Measuredangle /(°) | Error /(°) | Averageerror /(°) |
|---|
| 5.28 | 0.28 | | 4.68 | 0.32 | | | 10.37 | 0.37 | | 10.39 | 0.39 | | | 200 | 15.19 | 0.19 | 0.356 | 15.27 | 0.27 | 0.352 | | 20.32 | 0.32 | | 20.45 | 0.45 | | | 25.62 | 0.62 | | 25.33 | 0.33 | | | 5.61 | 0.61 | | 5.18 | 0.18 | | | 10.58 | 0.58 | | 10.23 | 0.23 | | | 300 | 14.67 | 0.33 | 0.560 | 15.27 | 0.27 | 0.426 | | 20.52 | 0.52 | | 20.52 | 0.52 | | | 24.24 | 0.76 | | 25.93 | 0.93 | | | 4.77 | 0.23 | | 5.21 | 0.21 | | | 10.54 | 0.54 | | 10.36 | 0.36 | | | 400 | 15.35 | 0.35 | 0.534 | 15.47 | 0.47 | 0.478 | | 20.72 | 0.72 | | 20.38 | 0.38 | | | 25.83 | 0.83 | | 24.03 | 0.97 | | | 5.63 | 0.63 | | 5.33 | 0.33 | | | 10.69 | 0.69 | | 9.60 | 0.40 | | | 500 | 14.27 | 0.73 | 0.728 | 14.49 | 0.51 | 0.498 | | 19.34 | 0.66 | | 20.62 | 0.62 | | | 25.93 | 0.93 | | 25.63 | 0.63 | | | 5.58 | 0.58 | | 5.28 | 0.28 | | | 10.56 | 0.56 | | 10.46 | 0.46 | | | 600 | 15.97 | 0.97 | 0.788 | 15.57 | 0.57 | 0.532 | | 19.12 | 0.88 | | 19.52 | 0.48 | | | 24.05 | 0.95 | | 24.13 | 0.87 | |
|
Table 5. Measurement results of α angle