
Constantinos Valagiannopoulos, Vassilios Kovanis. Engineering the emission of laser arrays to nullify the jamming from passive obstacles[J]. Photonics Research, 2018, 6(8): A43
- Photonics Research
- Vol. 6, Issue 8, A43 (2018)
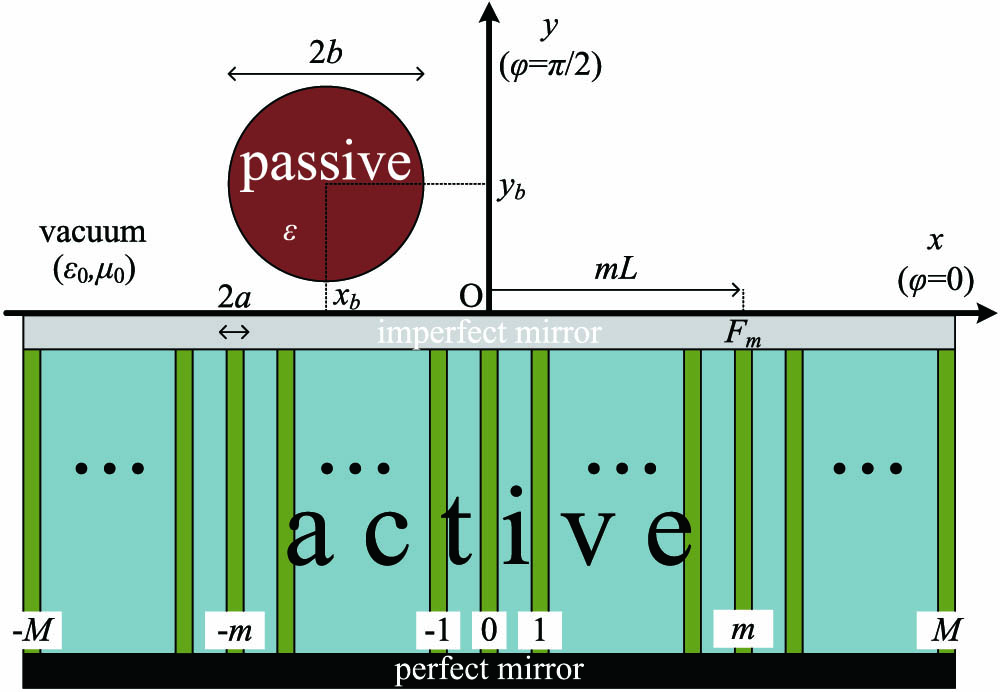
Fig. 1. Schematic of the regarded configuration. The aggregate field of an active laser array is perturbed by a passive cylindrical obstacle.
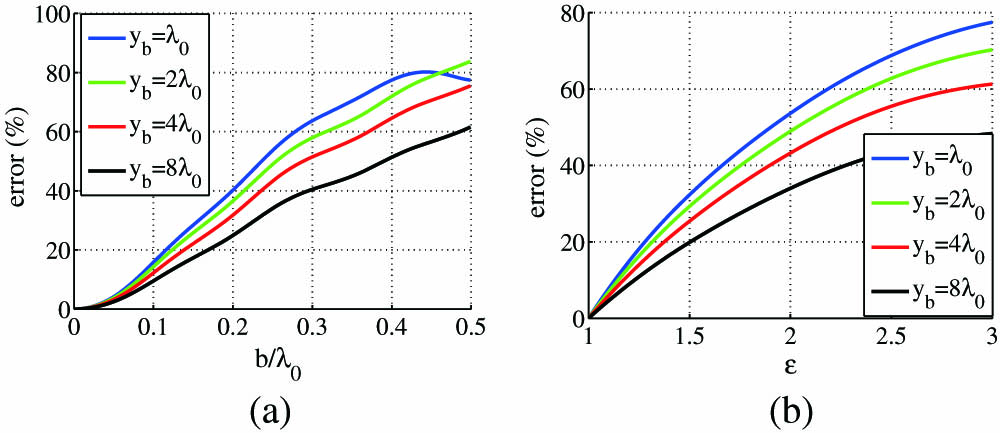
Fig. 2. Percent error of the obstacle-free optimal solution as functions of: (a) radius of the obstacle b / λ 0 ϵ = 2 ϵ b = λ 0 / 4 y b G ˜ ( φ ) = e − γ ( φ − ϑ ) 2 ϑ = 90 ° γ = 10 k 0 L = 0.1 M = 80 U = 12 x b = 0
Fig. 3. Percent error of the obstacle-free optimal solution as a function of the horizontal position of the obstacle x b / D = x b / ( M L ) b / λ 0 ϵ = 2 ϵ b = λ 0 / 4 y b = 2 λ 0 2 .
Fig. 4. Percent error of the obstacle-free optimal solution in contour plot of the permittivity ϵ b / λ 0 x b = 0 x b = M L = D = 4 λ 0 / π y b = 2 λ 0 2 .
Fig. 5. Ideal target G ˜ ( φ ) G ( φ ) φ b = λ 0 / 8 b = λ 0 / 4 b = λ 0 / 2 2 of this study and the worst case b = λ 0 / 2 ϵ = 2 x b = 0 y b = 2 λ 0 2 .
Fig. 6. (a) Percent error of optimal solution without and with the obstacle as a function of the optical distance between two neighboring lasers k 0 L G ˜ ( φ ) G ( φ ) φ k 0 L = 2.4 5(c) is considered.
Fig. 7. Ideal target G ˜ ( φ ) G ( φ ) φ ϵ = 1.5 ϵ = 2 ϵ = 2.5 2 of this study and the worst case ϵ = 2.5 G ˜ ( φ ) = e − β φ [ 1 + A cos ( α φ ) ] A = 0.7 α = 13.5 β = 0.2 k 0 L = 1 M = 50 U = 12 b = λ 0 / 4 x b = 0 y b = 2 λ 0
Fig. 8. Block diagram for the introduced processes and presented concepts of the study at hand. A greedy inverse search by trial and error for the actual obstacle; as long as the error is non-negligible, a new trial object is considered.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20