
Long Li, Zhiyan Pan, Haoyang Cui, Jiaorong Liu, Shenchen Yang, Lilan Liu, Yingzhong Tian, Wenbin Wang. Adaptive window iteration algorithm for enhancing 3D shape recovery from image focus[J]. Chinese Optics Letters, 2019, 17(6): 061001
- Chinese Optics Letters
- Vol. 17, Issue 6, 061001 (2019)
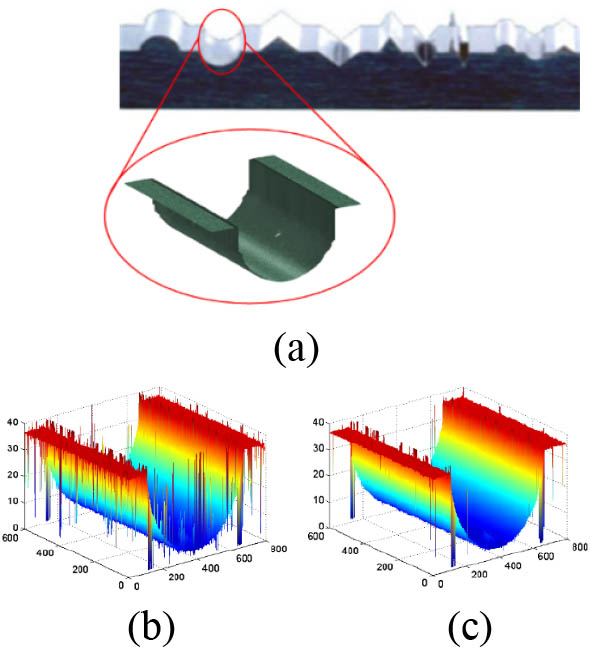
Fig. 1. Depth maps of semi-cylindrical model. (a) Alicona semi-cylinder standard model, (b) semi-cylinder using window size
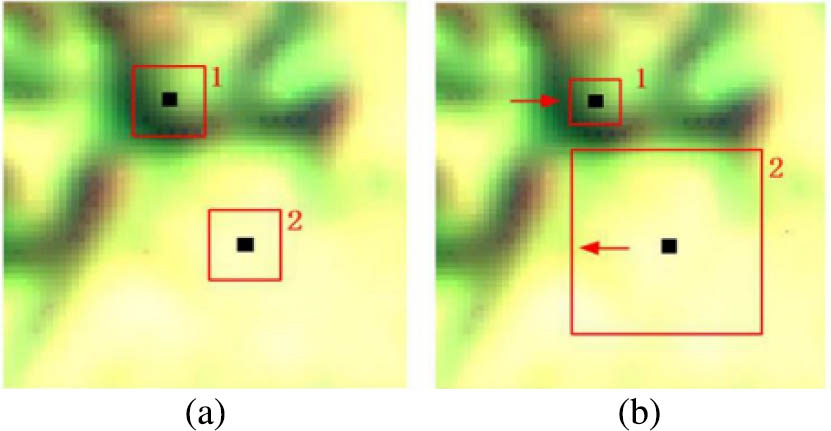
Fig. 2. Principle of algorithm for adaptive window size.
Fig. 3. Image focus evaluation process. (a) Image sequence acquisition, (b) regional focus, (c) fitting focus evaluation curve.
Fig. 4. Block diagram of the adaptive window iteration algorithm. (a) Calculate the window size for each pixel, (b) focus evaluation iteration.
Fig. 5. Reconstruct the object. (a) Triangle, (b) slope, (c) semi-cylinder.
Fig. 6. Depth maps of triangle:
Fig. 7. 3D shape reconstruction of objects: slope (first row), triangle (second row), semi-cylinder (third row), first iteration (first column), second iteration (second column), third iteration (third column), fourth iteration (fourth column).
Fig. 8. Focus curves during the iterative process for the object point (1108) of the semi-cylinder.
Fig. 9. Model improvements in terms of iterative HD. (a) Slope iteration, (b) triangle iteration, (c) semi-cylindrical iteration.
Fig. 10. Relationship analysis of RMSE.
| ||||||||||||||||||||||||||||||
Table 1. Optical Conditions and Acquisition Environment
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Performance Comparison (Adaptive Window=A.W)
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Changes of RMSE, PSNR, and CC Indicators in the Adaptive Window Iteration Algorithm (Focus Measure=FMSML*)

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20