
Rudan Zheng, Jinlong Li, Yu Zhang, Xiaorong Gao. Scattered Point Cloud Simplification Algorithm Based on Adaptive Neighborhood and Local Contribution Value[J]. Laser & Optoelectronics Progress, 2021, 58(16): 1610019
- Laser & Optoelectronics Progress
- Vol. 58, Issue 16, 1610019 (2021)
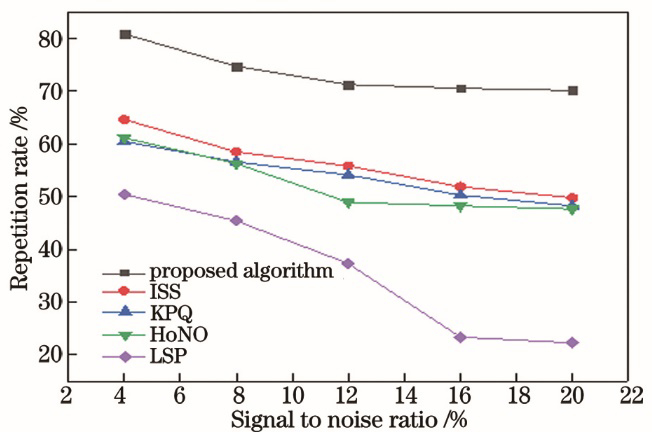
Fig. 1. Comparison of noise resistance of five algorithms
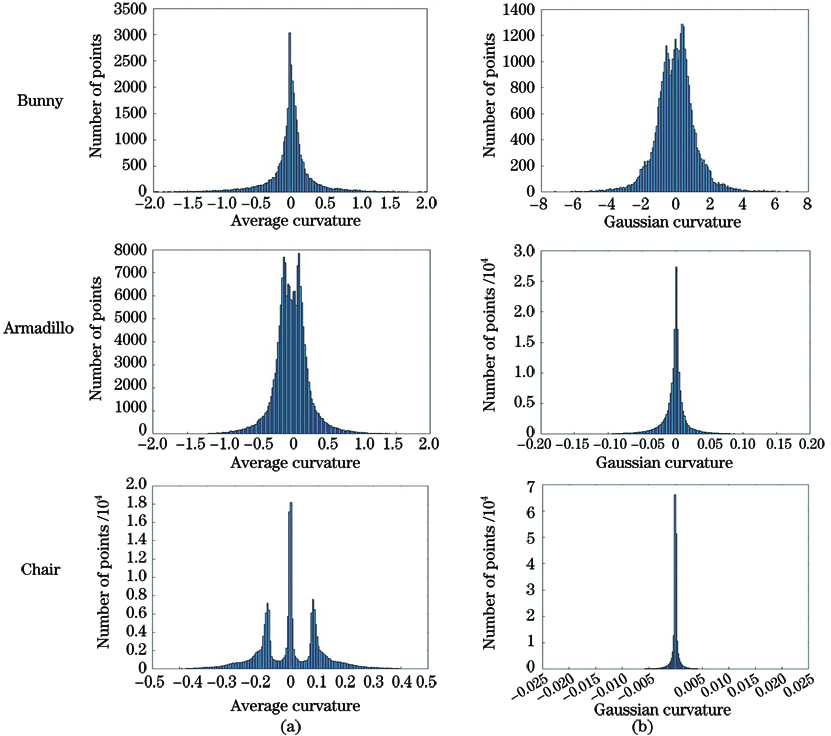
Fig. 2. Surface distribution of three datasets. (a) Average curvature; (b) Gaussian curvature
Fig. 3. Bunny model and reconstruction results. (a) Original point cloud; (b) original point cloud reconstruction; (c) simplification result of the proposed algorithm with 90% simplification rate; (d) reconstruction of simplification result of the proposed algorithm with 90% simplification rate
Fig. 4. Comparison on the Bunny model. (a) Standard deviation of error; (b) maximum grid area; (c) difference in reconstruction area
Fig. 5. Armadillo model and reconstruction results. (a) Original point cloud; (b) original point cloud reconstruction; (c) simplification result of the proposed algorithm with 90% simplification rate; (d) reconstruction of simplification result of the proposed algorithm with 90% simplification rate
Fig. 6. Comparison on the Armadillo model . (a) Standard deviation of error; (b) maximum grid area; (c) difference in reconstruction area
Fig. 7. Chair model and reconstruction results. (a) Original point cloud; (b) original point cloud reconstruction; (c) simplification result of the proposed algorithm with 90% simplification rate; (d) reconstruction of simplification result of the proposed algorithm with 90% simplification rate
Fig. 8. Comparison on the Chair model. (a) Maximum grid area; (b) difference in reconstruction area
|
Table 1. Classification of surface types

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20